Dış iskeletten sonra daha ucuz dış kaslarımız var
Robotlardan bahsetmişken, olağan izlenim güç, hız ve sağlamlığın sembolü gibi "Transformers" (Transformers) gibidir, ancak İsviçre Federal Teknoloji Enstitüsü Lozan'dan (EPFL) araştırmacılar "Büyük Kahramanlar" hakkında yorum yaptılar. Hero) yumuşak robotlar için yumuşak ve sevimli gibi yumuşak bir noktaya sahiptir.

EPFL Yeniden Yapılandırılabilir Robot Laboratuvarı (RRL) araştırmacıları, yazılım yöneticileri kullanarak bir dizi yazılım, esnek ve yeniden yapılandırılabilir yazılım robotları geliştirdiler. Pek çok araştırma sonucu "Scientific Reports" ve "Soft Robots" da yayınlanmıştır. (Soft Robotics) ve diğer uluslararası dergiler.
Yumuşak robotlar genellikle insan kaslarına benzer yumuşak aktüatörlerden oluşur ve yumuşak aktüatörlerin malzemeleri genellikle silikon ve kauçuk gibi elastomer malzemelerdir, bu nedenle çok güvenlidirler. Genellikle, yumuşak bir robotun vücut kısmı belirli bir "yumuşak hava yastığı" olarak tasarlanmıştır, böylece Yumuşak robotun hareket özelliklerini kontrol etmek için hava basıncını kullanın.
Bu nedenle, yumuşak robotlar düşük maliyetli, kontrolü kolay ve seri üretimleri kolaydır.Genellikle giyilebilir yardımcı cihazlar tasarlamak için kullanılırlar.Hastaların ameliyat sonrası rehabilitasyonunda, hassas nesnelerin manipülasyonunda, biyonik sistemlerde ve evde bakımda çok büyük potansiyel uygulamalara sahiptirler.

Gunjan Agarwal (Gunjan Agarwal), Matthew Robertson (Matthew Robertson) ve Jamie Paik (Jamie Paik). Resim kaynağı: EPFL
RRL Direktörü Jamie Paik, "Yumuşak robot tasarımımız güvenliğe büyük önem veriyor. Örneğin, rehabilitasyon eğitimi için bu yumuşak malzemeden yapılmış bir dış iskelet takmanın yaralanma olasılığı çok düşük."
Yazılım aktüatör kontrol modeli
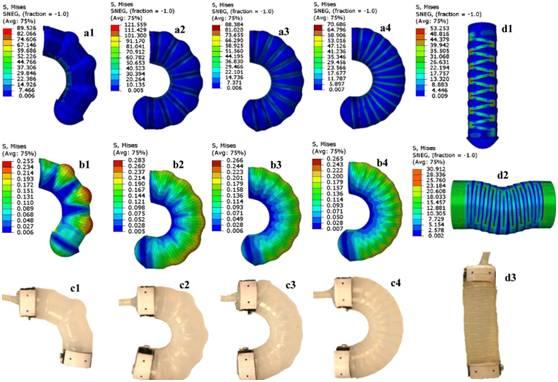
İlk sıra, yumuşak robotun (sert kabuk ve yumuşak çekirdek) genel gerilim simülasyon sonuçlarını temsil eder; ikinci sıra, yazılım robotunun yumuşak çekirdeğinin stres simülasyonunu temsil eder; üçüncü sıra, ilgili deneysel sonuçları temsil eder. Görüntü kaynağı: DOI: 10.1038 / srep34224
Araştırmacılar bir dizi sayısal simülasyon gerçekleştirdi ve her bir yazılım modülünün hareket özelliklerini doğru bir şekilde tahmin edebilen bir yazılım robot hareket kontrol tahmin modeli önerdiler. Bu yazılım modülleri, farklı modellere göre birden fazla hava odası ve bölmesinden oluşur, Yumuşak robot, orijinal uzunluğunun beş ila altı katına kadar uzayabilir ve iki yönde bükülebilir.
Araştırmacı Gunjan Agarwal şunları söyledi: "Pek çok simülasyon deneyinden sonra, yumuşak bir robotun deformasyon hareketi için, şekil, kalınlık ve üretim malzemeleri gibi farklı değişkenlere dayalı olarak aktüatörün deformasyon sonuçlarını etkili bir şekilde tahmin edebilen bir tahmin modeli önerdik. . "
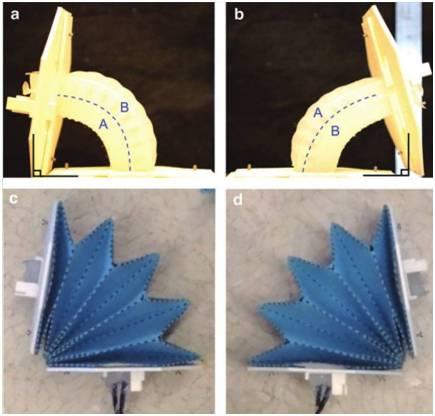
Pileli kağıt kabuklu yumuşak pnömatik aktüatörler (Yumuşak pnömatik aktüatörler, SPA) iki yönlü bükme hareketi. Resim kaynağı: DOI: 10.1089 / soro.2016.0023
Yumuşak robotlardan biri, yumuşak bir pnömatik aktüatörün (SPA) dış kabuğu olarak kalın kağıt kıvrımlı kağıt kabuk kullanır Deneysel sonuçlar, araştırmacı tarafından önerilen hareket kontrol öngörücü modelinin farklı malzemeler için uygun olduğunu göstermektedir.
Agarwal şunları söyledi: "Elastik malzeme yapısı yüksek esneklik ve çabuk toparlanma özelliklerine sahiptir, ancak kontrol edilmesi zordur. Deformasyonunun yolunu ve yönünü etkili bir şekilde tahmin edebilmeliyiz. Bunun nedeni, bu tür bir yumuşak robotun üretilmesi kolay ancak kontrol edilmesi zor olmasıdır, bu yüzden Yavaş yavaş geliştirdiğimiz ve tasarladığımız araçlar, robot meraklılarına ve öğrencilere yardımcı olmak için çevrimiçi olarak duyuruldu. "

Giyilebilir yardımcı yumuşak rehabilitasyon kemeri, fizik tedaviye yardımcı olmak için kullanılabilir. Resim kaynağı: EPFL
Giyilebilir yardımcı rehabilitasyon kemeri
Simülasyona ek olarak, RRL araştırmacıları tıbbi amaçlar için bir yumuşak robot geliştirdiler ve araştırma sonuçları "Soft Robotics" (SoftRobotics) dergisinde yayınlandı. Bir tür tıbbi yumuşak robot, hastaların dik durmasına yardımcı olmak ve rehabilitasyon eğitimi sırasında rehabilitasyon eylemlerini yönlendirmek için kullanılan, çok sayıda şişirilebilir bileşenden oluşan yumuşak bir rehabilitasyon kemeridir.
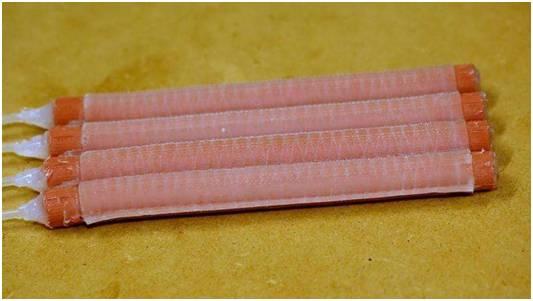
Yumuşak rehabilitasyon kemeri, hava pompası sistemine bağlı yumuşak olta ipi sarılmış lastik sıralarından oluşur. Resim kaynağı: EPFL

Pnömatik kontrollü rehabilitasyon kemeri bükme. Resim kaynağı: EPFL
Bu tür rehabilitasyon kemeri yumuşak robotu, yumuşak kauçuk (pembe) sıraları ve şeffaf oltadan yapılmıştır.Rehabilitasyon kemerinin kontrol kısmı harici bir hava pompası sistemi ile bağlanmıştır.Hava basıncı kontrolü tanıtıldığında, takılan misina doğru bir şekilde yönlendirilebilir. Yazılım modülü deforme olmuş.
Proje lideri Matthew Robertson, Bir sonraki adım, hava pompası sistemini küçültmek ve onu doğrudan rehabilitasyon kemerine entegre etmek. Şu anda, inme hastalarını tedavi etmek için Lozan Üniversitesi Tıp Fakültesi (CHUV) ile çalışıyoruz. Fizyoterapistlerin işbirliğiyle, rehabilitasyon kemerli bu yumuşak robot, hastanın gövdesini desteklemeye ve kas hassasiyetini geri kazanmaya yardımcı olabilir. "
Uyarlanabilir yeniden yapılandırılabilir robot
Yazılım robotlarının potansiyel uygulamaları bunun çok ötesine geçer. Araştırmacılar ayrıca sıkışık veya zorlu ortamlarda gezinmek için uyarlanabilir bir yumuşak robot geliştirdiler. Yumuşak robot oldukça esnek olduğu için, belirli bir miktar sıkma kuvvetine dayanabilmelidir.
Paiko şöyle dedi: " Yazılım yöneticileri kullanarak, farklı ortamlara uyum sağlayabilen farklı şekillerde yazılım robotları geliştirebiliriz. Ayrıca üretim malzemesi maliyeti düşüktür ve seri üretimi kolaydır. Bu yeni robotik dünyasının altın anahtarı olacak! "
referans:
1.G. Agarwal, N. Besuchet, B.N. Audergon ve J. Paik. Dayanıklı Yumuşak Aktüatörler için Yardımcı Giyilebilir Cihazlara Yönelik Gerdirilebilir Malzemeler, inScientific raporları, cilt 6, sayı 34224, 2016.
2.M.A. Robertson, H. Sadeghi, J. M. Florez ve J. Paik. Soft PneumaticActuator Fascicles for High Force and Reliability, SoftRobotics, 2016'da kabul edildi.
3.L. Paez, G. Agarwal ve J. Paik. Origami Shell Reinforcement ile Yumuşak Pnömatik Aktüatörün Tasarımı ve Analizi, Soft Robotics, cilt 3, sayı 3, 2016.
4.