Derinlik İHA sürü savaş teknolojisi ve çok ajanlı sistem teorisi
01. Genel Bakış
İnsansız sürü savaşı, insansız bir işletim cihazının yardımıyla, gerçek zamanlı veri iletişimi, çoklu uçak oluşumu ve dronlar arasında koordineli operasyonlar gerçekleştirmek için ve operatörlerin rehberliğinde kısmi otonom yeteneklere sahip bir dron grubunu ifade eder. Sızma keşfi, aldatma karıştırma ve grup saldırısı gibi bir dizi savaş görevini tamamlayın. İnsansız sürü savaş sistemi, taktikler ve strateji arasındaki boşluğu doldurabilir.Deniz, hava ve yer hedeflerine koordineli saldırılar ve diğer silah platformlarıyla ISR dahil olmak üzere çeşitli askeri görevleri gerçekleştirmek için çeşitli teslim yöntemleriyle hedef bölgeye hızlı bir şekilde teslim edilebilir. , Stratejik caydırıcılık, kampanya çatışması ve sıcak noktalara karşı taktik eylemler gerçekleştirmek.

Şekil 1 İHA küme savaş süreci
Başlangıçta insansız sürü savaş teknolojisi, çok ajanlı sistemler teorisinden türetilmiştir.Genel olarak, drone sürü savaş teknolojisindeki drone bir ajan olarak kabul edilir ve görevi yerine getiren drone oluşumu, bir çoklu ajan olarak kabul edilir. Sistem (Çok-etmenli Sistemler). Bu makale, drone sürü savaş teknolojisi ile arkasındaki çok ajanlı sistem teorisi arasındaki ayrılmaz bağlantıyı teorik bir perspektiften kısaca tanıtacaktır.
02. Geçmiş yaşam
Bir. Çok Etmenli Sistem (MAS) Teorisinin Gelişimi
Oğul davranışı, doğada yaygın bir fenomendir. Tipik örnekler, oluşum sırasında göç eden kuş sürüleri, gruplar halinde devriye gezen balık sürüleri, birlikte çalışan karınca kolonileri ve birlikte büyüyen bakteri topluluklarıdır. Bu fenomenlerin ortak özelliği, belirli sayıda özerk bireyin, karşılıklı işbirliği ve kendi kendine örgütlenme yoluyla, kolektif düzeyde düzenli olarak koordine edilmiş bir hareket ve davranış sergilemesidir.


Şekil 3 Vicsek tarafından 1995 yılında önerilen parçacık sürüsü modeli, bir süre sonra tüm parçacıkların sonunda aynı yönde hareket ettiği görülebilir.
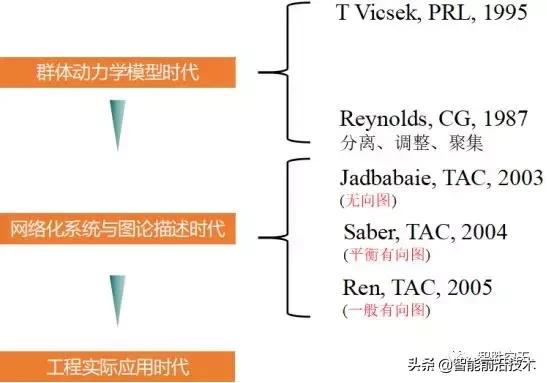
Şekil 4 Çok etmenli sistem teorisinin gelişim geçmişi
iki. Çok etmenli sistem (MAS) teorisinin özellikleri
Bireyler ve sistemler açısından, çok etmenli sistemler "bireysel zeka + iletişim ağı = genel spor davranışı" özelliklerine sahiptir. Bunlar arasında, "bireysel zeka", grup sistemini oluşturan her bireyin, belirli bir dereceye kadar kendi kendine hareket kontrolü, yerel bilgi algılama, işleme ve iletişim yetenekleri dahil olmak üzere belirli bir özerkliğe sahip olduğu anlamına gelir. Örneğin, trafik akışının oluşumunda ve sürdürülmesinde, her sürücü genellikle yalnızca kendi hareket durumunu, bitişik araçların hareket durumuna (göreceli mesafe ve hız) göre ayarlayabilir. Ortak hızlanma veya yavaşlama kurallarına dayalı olarak, trafik akışının bir bütün olarak düzenli bir hareketi oluşturulabilir.

Şekil 5 Trafik akışındaki arabalar, genel araba grubunun hareketini elde edemez ve sadece bitişik araçları hızlandırabilir veya yavaşlatabilir.
Özet olarak, çok etmenli sistem aşağıdaki özelliklere sahiptir:
(1) Dağıtılmış: Ademi merkeziyetçilik olarak da bilinir. Tüm küme sisteminde tüm aracıları kontrol edecek bir merkezi denetleyici yoktur ve her bir aracı belirli bir derecede özerkliğe sahiptir. Bu özellik, çok ajanlı sistemin iyi bir sağlamlığa sahip olmasını sağlar Spesifik performans, drone sürüsünde görevi yerine getiren birkaç insansız hava aracı arıza veya saldırı nedeniyle işlevini kaybetse bile, kalan dronların yeniden başlatılabilmesidir. Ağ kurulduktan sonra, savaş alanının beka kabiliyetini artıran görev devam etti.
(2) Temsilci özerkliği: Adından da anlaşılacağı gibi, bir temsilcinin belirli konum paylaşımı, yol planlama ve engellerden kaçınma yetenekleri vardır. Özellikle sürüdeki insansız hava araçları belirli kurallara göre otonom olarak uçabilir, komutanı ağır savaş görevlerinden kurtarabilir ve gerektiğinde manuel müdahale yapabilirler.
(3) Dağıtılmış karmaşık fonksiyonlar: Bir nesnenin çok sayıda karmaşık fonksiyona sahip olması gerektiğinde, onu kontrol etmek için uygun bir kontrol şeması tasarlamak zordur. Çok aracılı bir sistemde, nispeten basit yapılara ve işlevlere sahip birden çok aracı, çeşitli karmaşık görevleri işbirliğine dayalı bir şekilde tamamlayabilir. Spesifik olarak, insansız sürü savaş sistemindeki dronları, sızma keşfi, yangın söndürme ve hedef imha gibi çeşitli savaş gereksinimlerini tamamlamak için farklı ekipman ve silahlarla donatabilir.
03, bu hayat
Bir. Askeri İHA operasyonlarının fiili muharebe uygulamasında var olan temel sorunlar
Mevcut askeri insansız hava araçları esas olarak aşağıdaki iki soruna sahiptir:
1. Tek makinenin sınırlı yerleşik işlevleri vardır:
(1) Tek uçakta havadan taşınan ekipmanın keşif kabiliyeti sınırlıdır ve hedefleri her yönden etkili ve sürekli olarak tespit etmek ve izlemek zordur;
(2) Tek bir uçağın silah yükü sınırlıdır ve bu da vuruş gücünü ve etkisini sınırlar;
(3) Onlara verilen görevler daha karmaşık ve çeşitli hale geliyor ve gerekli sensör sayısı ve türü artıyor;
2. Tek makinenin bilinmeyen faktörlere direnme yeteneği zayıftır:
(1) Ekipman arızası meydana geldiğinde, görev muhtemelen ertelenir veya hatta iptal edilmeye zorlanır;
(2) Bir yüksek tehdit hava savunma sistemi ile karşı karşıya kaldığında, önlenmesi ve hasar görmesi kolaydır ve bu da görevin başarısızlığına yol açar;
(3) Yer kontrol bağlantısının aynı anda birden fazla insansız hava aracını kontrol etmesi zordur, bu da az sayıda hava dronu ile sonuçlanır;

Şekil 6 Koordineli operasyonlar için yüksek irtifada konuşlandırılan yoğun sabit kanatlı İHA oluşumları
iki. Drone sürü savaş teknolojisinde MAS ile ilgili anahtar teknolojiler
1. Drone sürü savaş sistemindeki homojen / heterojen konular sorunu
İHA sürüsü savaş teknolojisi kavramı, doğal dünyadaki bal ve karınca kolonilerini simüle etmektir ve sistem ayrıca keşif, saldırı ve savunma işlevlerini yerine getirmelidir. Sürüde insansız hava araçlarının taşıdığı savaş silahları ve iletişim teçhizatında bazı farklılıklar vardır, bu nedenle insansız sürü savaş sistemi zengin bir heterojen ajan (Heterojen Ajanlar) içerir.
(Not: Genel olarak, MAS teorisinde, sistemdeki tüm ajanların dinamik modelleri aynıysa, o zaman çoklu ajan sistemindeki ajanların izomorfik olduğu ve bunun tersi de geçerlidir.)
Şu anda, İHA sürü savaş teknolojisinin mekanizması üzerine yapılan araştırmalar dört formla sınırlıdır: Yakın Dövüş, Massing, Manevra ve Swarming. Modern savaşın özelliklerini karşılayan teknoloji-taktik entegre bir sistem oluşturmamıştır.

Şekil 7 ABD Donanması'nın halka açık X-47B ve F / A-18 işbirlikçi testlerinin fotoğrafları
Ağustos 2014'te ABD Donanması, bir uçak gemisinde insanlı taşıyıcı tabanlı bir uçak ve taşıyıcı tabanlı bir İHA'nın ilk ortak kalkış ve inişini gerçekleştirdi. Testte, iki F / A-18 "Hornet" savaş uçağı ve bir X-47B uçak gemisi, bu tür bir taşıyıcıyı test etmek için nükleer enerjili uçak gemisi "Roosevelt" ten aynı modda havalandı. Dronların kalkış ve iniş yetenekleri. Koordineli operasyonlarda insanlı uçakları ve insansız hava araçlarını kontrol etmek zordur.Amerika Birleşik Devletleri'nde gelecekteki araştırmaların odak noktası, insansız hava araçlarının hava kontrol yetenekleridir.
2. Drone sürü savaş sistemindeki iletişim topolojisi ağı sorunu

Şekil 8 Birden fazla nesneyi kontrol ederken kullanılan üç kontrol / iletişim yapısı
3. Drone sürü savaş sistemindeki uçuş oluşumu kontrol problemi
İnsansız sürü savaş sistemlerinde görev yapan İHA'ların en temel eylem şartı, belirli bir dizilişin diziliş halinde uçmasını sağlamaktır. Şimdi, önerilen birden fazla otonom aracın kooperatif oluşum yöntemlerini tartışacağız:
(1) Lider-takipçi yöntemi. Bu yöntemde, oluşum halinde uçan kuşların biyolojik aktiviteleri simüle edilir ve bir drone lider (yani lider) olarak belirlenir ve diğer insansız hava araçları takipçi (kanat adam) olarak belirlenir. Takipçiler, liderin konumunu ve yönünü belirli bir sapma ile izler.
(2) Konsensüs yöntemi. Bu yöntem, orijinal olarak çok-etmenli sistemin tutarlılık probleminden kaynaklanmıştır Bu problemin amacı, sistemdeki her bir aracı (İHA) için dağıtılmış bir kontrol algoritması tasarlamak ve böylece tüm aracıların tüm durum değerlerinin aynı değere ulaşmasıdır. Bu temelde, her ajan için belirli bir uçuş düzeni elde etmek üzere belirli bir sapma belirlenir.
(3) Davranış temelli kontrol. Bu yöntemin temeli, ana kontrol hedeflerini görevlere veya davranışlara ayırmaktır. Bu yöntem aynı zamanda çarpışmadan kaçınma, merkez toplama, engellerden kaçınma gibi karmaşık grup davranışlarını da ele alabilir.
04 Sergi
Yapay zekanın sürekli gelişimi ve çeşitli akıllı kontrol algoritmalarıyla, çok ajanlı sistemler teorisine dayanan drone sürüsü savaş teknolojisi, nicel avantajlarına tam anlamıyla yer verirken keşif, penetrasyon ve grev gibi bir dizi taktik görevi tamamlayabilir. Ve savaş yeteneklerini hedefli bir şekilde geliştirmek için bu temelde yeni bir tür hava muharebe kuvveti oluşturun. Son teknoloji bir hava muharebe teknolojisi olarak, insansız sürü savaş teknolojisi araştırması, gelecekte İHA oluşumlarının otonom işbirliği yeteneklerini iyileştirmek için işbirliğine dayalı algoritmaların geliştirilmesine odaklanacaktır; yazılım açık mimarisi ve destek çerçeveleri; sistem imalatı, entegrasyonu ve Sunumlar gibi temel konular.
Kaynak: Intelligence Peak, Outsmarting Sky ve Sky