Today Paper | 3B hareket tahmini; kendi kendine öğrenen robot; sağlam anlamsal bölümleme; evrişimli sinir ağı; karışık Gauss süreci, vb.
Akademik gençlerin en yeni araştırma sonuçlarını ve teknolojilerini daha iyi öğrenmelerine yardımcı olmak için, AI Technology Review ve Paper Research Institute (paper.yanxishe.com) [Paper.yanxishe.com) [Paper Today] sütununu başlattı ve her gün sizin için yapay zekanın sınırlarını seçeceğiz. Akademik belgeler, çalışma referansınız içindir. Aşağıdakiler bugünün seçili içeriğidir
içindekiler
-
Gerçek zamanlı sinir ağlarını kullanan kendi kendine öğrenen robot
-
Beyin Tümörü Bölgelerinin 3D MRI'lardan Sağlam Anlamsal Segmentasyonu
-
Evrişimli Sinir Ağlarının doğruluklarının mimari karakterizasyonlarından çıkarılması
-
İnsan Görev Serpiştirme Modeli Olarak Hiyerarşik Pekiştirmeli Öğrenme
-
Sağlam Ekonomik Model Tahmine Dayalı Denetime Hibrit Gauss Süreci Yaklaşımı
-
Doğruluk Kontrolü için İlişkilendirilmiş Çok İlişkisel Dikkat Ağı URL Önerisi
-
Veri Yapısı Temelleri >
HandAugment: HANDS19 Zorluk Görevi 1 için Basit Bir Veri Artırma - Derinliğe Dayalı 3D El Duruşu Tahmini
-
'F'den' A'ya >
Bilgi Teorik Modeli Tahmine Dayalı Q-Öğrenme
Gerçek zamanlı sinir ağını kullanan kendi kendine öğrenen robot
Kağıt adı: Gerçek zamanlı sinir ağlarını kullanan kendi kendine öğrenen robot
Yazar: Gupta Chirag / Nangia Chikita / Kumar Chetan
Gönderme süresi: 2020/1/6
Kağıt bağlantısı: https://paper.yanxishe.com/review/8314?from=leiphonecolumn_paperreview0108
Tavsiye nedeni: Yüksek kapasiteli, düşük hassasiyetli bilgi işlem teknolojisinin geliştirilmesi ve bilişsel yapay zeka sezgisel sistemlerin uygulanmasıyla, gerçek zamanlı öğrenme yeteneklerine sahip sinir ağları aracılığıyla makine öğrenimi çözümleri, araştırma topluluğunda ve tüm sektörde büyük ilgi uyandırdı. .
Bu makale, kolları olan bir robot üzerinde uygulanan sinir ağının, robotun evrimi yoluyla araştırılmasını, geliştirilmesini ve deneysel analizini içerir, gerektiğinde düz çizgileri öğrenebilir veya yürüyebilir. Sinir ağı, öğrenme için gradyan iniş ve geri yayılım algoritmalarını kullanır. Sinir ağının gerçekleştirilmesi ve eğitimi, Raspberry Pi 3 üzerindeki robot üzerinde yerel olarak yapılır, bu nedenle öğrenme süreci tamamen bağımsızdır. Öncelikle, sinir ağını MATLAB üzerinde geliştirilen özel bir simülatörde test edin ve ardından bunu Raspberry Pi bilgisayarında uygulayın. Verileri her neslin gelişen ağında depolayın ve veriler üzerinde matematiksel ve grafiksel analizler yapın. Öğrenme hızı ve hata toleransı gibi faktörlerin öğrenme süreci ve nihai çıktı üzerindeki etkisi analiz edilir.




3D MRI'dan beyin tümörü bölgelerinin sağlam anlamsal segmentasyonu
Bildiri Başlığı: Beyin Tümörü Bölgelerinin 3D MRI'lardan Sağlam Anlamsal Segmentasyonu
Yazar: Myronenko Andriy / Hatamizadeh Ali
Gönderme süresi: 2020/1/6
Kağıt bağlantısı: https://paper.yanxishe.com/review/8316?from=leiphonecolumn_paperreview0108
Öneri nedeni: Multimodal Beyin Tümörü Segmentasyon Zorluğu (BraTS), 3D MRI beyin tümörü segmentasyonunun otomatik yöntemini geliştirmek için araştırmacıları bir araya getiriyor. Tümör segmentasyonu, hastalık teşhisi ve tedavi planlaması için gerekli temel görsel görevlerden biridir. Modern GPU'ların ortaya çıkması sayesinde, önceki yıllarda kazanan yöntemlerin tümü, derin evrişimli sinir ağı mimarisini hızla optimize edebilen derin öğrenmeye dayanıyor.
Bu çalışmada yazar, segmentasyonun doğruluğunu daha da iyileştirmek amacıyla geleneksel kodlayıcı-kod çözücü mimarisi ve birleşik kayıp işlevi dahil olmak üzere 3B anlamsal segmentasyonun en iyi uygulamalarını araştırdı. Yazar, BraTS 2019 Challenge'ın yaklaşımını değerlendirdi.


Doğruluğunu evrişimli sinir ağının mimari özelliklerinden çıkarın
Kağıt adı: Evrişimli Sinir Ağlarının doğruluklarını mimari karakterizasyonlarından çıkarsama
Yazar: Hoang D. / Hamer J. / Perdue G.N. / Young S.R. / Miller J. / Ghosh A.
Gönderme süresi: 2020/1/7
Kağıt bağlantısı: https://paper.yanxishe.com/review/8311?from=leiphonecolumn_paperreview0108
Öneri nedeni: Evrişimli Sinir Ağları (CNN), parçacık görüntüleme dedektörleri de dahil olmak üzere birçok alandan bilimsel verileri analiz etmede büyük umut vaat ediyor. Ancak, belirli uygulamalar ve farklı veri kümeleri için doğru ağ mimarisini (derinlik, çekirdek şekli, etkinleştirme işlevi vb.) Seçmenin zorlukları hala tam olarak anlaşılamamıştır.
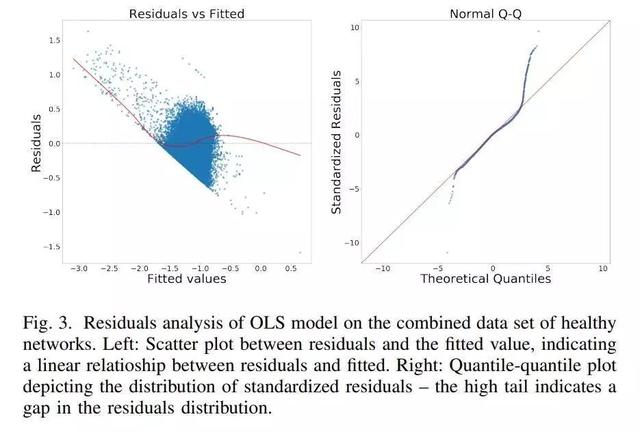
Bu makalede yazar, eğitimden önce farklı CNN'lerin mimarisini karşılaştırmak için yararlı olan sistematik bir dil önererek CNN mimarisi ile performansı arasındaki ilişkiyi incelemektedir. CNN mimarisini farklı özniteliklerle karakterize edin ve bu özniteliklerin, Fermi Ulusal Hızlandırıcı Laboratuvarı MINERvA deneyinde, bilgisayarla görmeye dayalı iki fiziksel problemde, olay köşe keşfinde ve hadron çokluda ağ performansını tahmin edebildiğini kanıtlayın. Cinsel sınıflandırma. Yazar, bu amaçla, fiziksel problemler için optimize edilmiş ağ mimarisinden birkaç mimari öznitelik çıkardı.Bu öznitelikler, Çok Düğümlü Derin Öğrenme Sinir Ağı (MENNDL) adı verilen bir model seçim algoritmasının çıktısıdır. Yazar, ağın eğitimden önce belirli bir eşik doğruluğundan daha iyi performans gösterip gösteremeyeceğini tahmin etmek için bir makine öğrenimi modeli kullanır.
Rastgele tahminle karşılaştırıldığında, model% 16-20 daha iyi performans gösteriyor. Ek olarak, yazar, çok sayıda ağın doğruluk regresyonunda sıradan en küçük kareler modelinin belirleme katsayısının 0.966 olduğunu bulmuştur.


İnsan görevinin iç içe geçmesinin bir modeli olarak hiyerarşik pekiştirmeli öğrenme
Bildiri Başlığı: Bir İnsan Görevi Serpiştirme Modeli Olarak Hiyerarşik Pekiştirmeli Öğrenme
Yazar: Gebhardt Christoph / Oulasvirta Antti / Hilliges Otmar
Gönderme süresi: 2020/1/4
Kağıt bağlantısı: https://paper.yanxishe.com/review/8313?from=leiphonecolumn_paperreview0108
Tavsiye nedeni: İnsanlar bir görevin ne kadar sürmesi gerektiğine, başka bir görevi ne zaman değiştirip gerçekleştireceklerine nasıl karar verirler? Görev serpiştirmeyi destekleyen mekanizmaları anlamak, bilişsel bilimin uzun vadeli bir hedefidir. Önceki çalışma, marjinal getirileri maksimize eden açgözlü buluşsal yöntemler ve politikalar önermişti. Ancak, bu stratejinin birden fazla görevin sağlandığı, dönüştürme maliyetlerinin pahalı olduğu ve geri dönüşlerin geciktiği günlük ortama nasıl uyarlanabileceği henüz net değildir.
Burada yazar, pekiştirmeli öğrenme (RL) tarafından yönlendirilen hiyerarşik bir denetim kontrolü modeli geliştirir. Süpervizör seviyesi, daha düşük seviyelerde hesaplanan göreve özgü yaklaşık fayda tahminlerini kullanarak geçiş yapmayı öğrenir. Birden fazla görevde ve keyfi ve belirsiz ücret ve maliyet yapılarında bile, hiyerarşik optimal değer fonksiyonu ayrıştırması deneyimden öğrenilebilir. Bu model, görev kademelendirmesinin bilinen ampirik etkilerini yeniden üretir. Altı görevli problemde (N = 211) miyopi temeliyle karşılaştırıldığında, kişisel verileri daha iyi tahmin edebilir. Sonuçlar, görev serpiştirme için makul bir model olarak hiyerarşik RL'yi destekler.


Karma Gauss Süreci Sağlam Ekonomik Model Prediktif Kontrol Yöntemi
Bildiri Başlığı: Sağlam Ekonomik Model Öngörücü Denetime Karma Gauss Süreci Yaklaşımı
Yazar: Rostam Mohammadreza / Nagamune Ryozo / Grebenyuk Vladimir
Gönderme süresi: 2020/1/7
Kağıt bağlantısı: https://paper.yanxishe.com/review/8308?from=leiphonecolumn_paperreview0108
Tavsiye nedeni: Kontrolörün tutuculuğunu azaltmak için, bu makale bilinmeyen gelecekteki rahatsızlıklar altında sağlam ekonomik model öngörücü kontrolü için karma bir Gauss süreci (GP) yöntemi önermektedir. Önerilen hibrit GP, nükleer bileşen ve doğrusal olmayan otoregresif olmak üzere bilinen iki yöntemin bir kombinasyonudur. Tahmin sonuçlarını analiz ettikten sonra, girişim tahmini için bu yöntemlerden birini seçmek için bir anahtarlama mekanizması kullanılır. Hybrid GP, geçmiş girişim ölçümlerini kullanarak kalıpları tespit etmeyi ama aynı zamanda bilinmeyen girişimde beklenmedik davranışları tespit etmeyi amaçlamaktadır.
Hibrit GP'de, eski ölçümlerin ağırlığını azaltabilen ve böylelikle en son girişim değerine dayalı olarak tahmin doğruluğunu geliştiren yeni bir unutma faktörü konsepti de kullanılmaktadır. } Tespit edilen girişim bilgisi, tahminin belirsizliğini azaltmak için kullanılır. Ekonomik modeller için kestirimci denetleyici. Simülasyon sonuçları, diğer GP tabanlı yöntemlerle karşılaştırıldığında, bozukluğun tanınabilir bir modele sahip olması durumunda bu yöntemin ekonomik model öngörücü denetleyicinin genel performansını iyileştirebileceğini göstermektedir.



Gerçek algılama URL önerisi özniteliği çok ilişkisel dikkat ağı
Kağıt adı: Doğruluk Kontrolü için İlişkilendirilmiş Çok İlişkisel Dikkat Ağı URL Önerisi
Yazar: You Di / Vo Nguyen / Lee Kyumin / Liu Qiang
Gönderme süresi: 2020/1/7
Kağıt bağlantısı: https://paper.yanxishe.com/review/8309?from=leiphonecolumn_paperreview0108
Önerinin nedeni: Sahte haberlerle mücadele etmek için araştırmacılar esas olarak sahte haberler bulmaya odaklanırken, gazeteciler doğruluk kontrolü yapan web siteleri (örneğin, bu URL (https://www.snopes.com/) ve bu URL ( https://www.politifact.com/)). Bununla birlikte, sahte haberlerin yayılması, sosyal medya siteleri aracılığıyla büyük ölçüde tanıtıldı ve bu doğruluk kontrol siteleri tam olarak kullanılmadı.
Bu sorunların üstesinden gelmek ve mevcut sahte haber yöntemlerini desteklemek için bu makale, sahte haberlerin Twitter ve Facebook gibi sosyal medya siteleri üzerindeki etkisini azaltmak için derin öğrenmeye dayalı bir doğruluk kontrolü URL tavsiye sistemi önermektedir. Özellikle, yazar tarafından önerilen çerçeve, kullanıcı URL çiftleri, kullanıcı-kullanıcı çiftleri ve URL-URL çiftleri arasındaki karmaşık / anlamsal ilişkileri öğrenmek için çok ilişkisel bir dikkat modülü ve heterojen bir grafik dikkat ağından oluşur. Gerçek veri setleri üzerinde yapılan çok sayıda deney, önerilen çerçevemizin en son sekiz öneri modelinden en az% 3 ~% 5,3 daha iyi olduğunu göstermektedir.


Kalıcı belleğin veri yapısı ilkelleri: bir değerlendirme
Kağıt adı: Veri Yapısı Temelleri > Yazar: Götze Philipp / Tharanatha Arun Kumar / Sattler Kai-Uwe
Gönderme süresi: 2020/1/7
Kağıt bağlantısı: https://paper.yanxishe.com/review/8310?from=leiphonecolumn_paperreview0108
Önerilen neden: Halihazırda mevcut olan Intel Optane DC kalıcı bellek teknolojisi gibi kalıcı bellek (PM), veritabanı mimarisi üzerinde önemli bir etkisi olan çok umut verici bir gelecek nesil bellek çözümünü temsil eder. Bu yeni teknolojinin çeşitli veri yapıları ve özellikleri önerilmiştir. Bununla birlikte, temelde yalnızca kişisel düşüncelerin ve PM özelliklerinin etkisini gizleyen tam yapı önerilmiş ve değerlendirilmiştir.
Bu nedenle, bu makalede, şimdiye kadar tanıtılan yapıyı ayrıştıracağız, temel tasarım ilkelerini belirleyeceğiz ve bunları Proje Yöneticisi için uygun tasarım hedeflerine atayacağız. Gerçek PM donanımı üzerinde kapsamlı bir deneyin sonucu, yazarın mikro düzeyde ilkel ödünleşmeleri ortaya çıkarabilmesidir. Sonuç olarak, seçilen grafik öğesinin performans profili dışa aktarılabilir. Bunlarla, en iyi kullanım durumları ve güvenlik açıkları doğru bir şekilde belirlenebilir. Yazar, PM tabanlı veri yapısı tasarımına ilişkin genel kavrayışlara ek olarak, şu ana kadar literatürde dikkate alınmayan yeni umut verici kombinasyonları da keşfetti.

HandAugment: HANDS19 zorluk görevi 1 derinliğe dayalı 3B hareket tahmini için basit bir veri artırma yöntemi
Bildiri Başlığı: HandAugment: HANDS19 Zorluk Görevi 1 için Basit Bir Veri Artırma - Derinliğe Dayalı 3B El Duruşu Tahmini
Yazar: Zhang Zhaohui / Xie Shipeng / Chen Mingxiu / Zhu Haichao
Gönderme süresi: 2020/1/3
Kağıt bağlantısı: https://paper.yanxishe.com/review/8175?from=leiphonecolumn_paperreview0108
Öneri nedeni: Bu makale, 3B alan derinliği görüntülerinde hareketleri tahmin etme sorununu ele almaktadır.
Bu makale, sinir ağı öğreniminin iki aşamasını içeren basit bir veri büyütme yöntemi olan HandAugment'ı önermektedir: ilk aşama, yinelemeli bir modda el görüntü bloklarını çıkarır ve derinlik haritasına göre elin ilk duruşunu tahmin ederek gürültü haritasını filtreler. Bloklar (ör. Arka plan ve kollar). Çıkarılan karolar ve ilk el duruşu, son el duruşunu elde etmek için sinir ağının ikinci aşamasına ikame edilir.
Bu iki aşamalı strateji, hareket tanımanın doğruluğunu büyük ölçüde artırdı ve alan derinliğine dayalı HANDS19 zorluk görevi 1-3D hareket tanıma yarışmasında birinci oldu.


"F" den "A" ya New York Regent Bilim Sınavı: Aristo Projesine Genel Bakış
Kağıt adı: From'F 'to'A' > Yazar: Clark Peter / Etzioni Oren / Khashabi Daniel / Khot Tushar / Mishra Bhavana Dalvi / Richardson Kyle / Sabharwal Ashish / Schoenick Carissa ...
Yayın zamanı: 2019/9/4
Kağıt bağlantısı: https://paper.yanxishe.com/review/7846?from=leiphonecolumn_paperreview0108
Önerilen neden: yapay zeka satranç, go, poker ve hatta "Tehlike" konusunda olağanüstü bir ustalık kazandı, ancak çeşitli standartlaştırılmış testler hala büyük bir zorluk. 2016'da bile, en iyi AI sistemi, 8. sınıf bilim testi yarışmasında yalnızca% 59,3'e ulaştı.
Bu makale, sistemin ilk kez grafik olmayan çoktan seçmeli (NDMC) soruda% 90'dan fazla puan aldığı New York'taki 8. sınıf Regent Science Sınavının benzeri görülmemiş başarısını bildiriyor. Ayrıca, son dil modellerinin başarısına dayalı olarak, Aristo sistemimiz 12. sınıf fen sınavında karşılık gelen NDMC sorularının% 83'ünü aştı. Görünmez test soruları üzerinde elde edilen sonuçlar, bu testin farklı test yıllarında ve farklı varyantlarında güvenilirdir. Modern NLP yöntemlerinin bu görevi üstlenebileceğini kanıtladılar. Genel problem çözmeye tam bir çözüm olmasa da (problem çoktan seçmeli ve alan 8. sınıf fen bilgisi ile sınırlı), bu alanda önemli bir kilometre taşını temsil ediyor.



Bilgi teorisi modeli Q öğrenmesini öngörür
Kağıt adı: Bilgi Teorik Modeli Tahmine Dayalı Q-Öğrenme
Yazar: Bhardwaj Mohak / Handa Ankur / Fox Dieter / Boots Byron
Gönderme süresi: 2019/12/31
Kağıt bağlantısı: https://paper.yanxishe.com/review/8312?from=leiphonecolumn_paperreview0108
Önerilen neden: Deneyim ucuza toplanabildiğinde, model içermeyen pekiştirmeli öğrenme (RL) algoritması sıralı karar problemini iyi çözebilir; sistem dinamikleri doğru bir şekilde modellenebildiğinde, model tabanlı RL etkilidir. Ancak robotik gibi gerçek dünya problemlerinde bu iki varsayım ihlal edilebilir Bu durumda sistemi sorgulamanın maliyeti çok yüksek olabilir ve gerçek dünya dinamiklerini doğru bir şekilde modellemek zor olabilir. Simülasyondan gerçek yöntemler (etki alanı randomizasyonu gibi) önyargılı simülasyonun etkilerini azaltmaya çalışsa da, optimizasyon zorluklarından (yerel minimumlar ve randomizasyon için elle tasarlanmış dağıtımlar gibi) hala muzdariptirler ve bu da doğru küresel değer işlevlerini öğrenmeyi zorlaştırmaktadır. Veya doğrudan gerçek dünya politikasına aktarın.
RL'nin aksine, model öngörücü kontrol (MPC) algoritması, gerçek dünyadaki dinamik değişikliklere etkili bir şekilde yanıt verebilecek bir kapalı döngü denetleyicisi oluşturmak için çevrimiçi basit stratejileri optimize etmek için bir simülatör kullanır. MPC performansı genellikle model sapması ve sınırlı optimizasyon aralığı gibi faktörlerle sınırlıdır.
Bu çalışmada yazar, bilgi teorisi MPC ve entropi düzenlileştirme RL arasında yeni bir teorik bağlantı önermekte ve bir önyargı modeli kullanabilen bir Q öğrenme algoritması geliştirmektedir. Optimal kontrolün iyileştirilmesini ve sıfırdan öğrenmeyi pekiştirmeyi göstermek için Sim-sim kontrol görevinde önerilen algoritmayı doğruladık. Yöntemimiz, takviye öğrenme algoritmalarının gerçek robotlara sistematik olarak yerleştirilmesinin yolunu açar.


Lei Feng Ağı Lei Feng Ağı Lei Feng Ağı