Derinlemesine analiz: Özyüz algoritma ilkesi ve PCA geometrik anlamı (yüz serisi 1)

Eigenface, makine görüşü alanındaki yüz tanıma problemlerinde kullanılan bir dizi özellik vektörünü ifade eder. İlk olarak Sirovich ve Kirby (1987) tarafından önerilmiş ve Matthew Turk ve Alex Pentland tarafından yüz tanıma için kullanılmıştır. Özyüz PCA (temel bileşenler analizi) yöntemi ile elde edilmiştir. Bu makale, özyüz algoritmasını tam olarak anlamak için PCA ilkesini ve yüz algılama ve tanıma fikirlerini kapsamlı bir şekilde analiz etmektedir.
İlk olarak, PCA prensibi ve geometrik anlamı
1. Vektör sol çarpım matrisinin geometrik anlamı
Vektörü doğru bir şekilde tanımlamak için, önce koordinat sistemini (tabanı) belirlemeli ve ardından tabanın bulunduğu her bir düz çizgi üzerindeki projeksiyon değerlerini vermeliyiz.Bu izdüşüm değerleri, mevcut tabana göre belirlenen koordinatlardır. Bu nedenle, bir vektörü bir uzaydan yeni bir uzayın temsiline dönüştürmek istiyorsanız, mevcut vektörün yeni tabandaki izdüşümünü hesaplamanız gerekir.

M N boyutlu vektörlere sahipsek ve bunları R N boyutlu vektörlerle temsil edilen yeni bir uzaya dönüştürmek istiyorsak, önce R tabanlarının sütunlarıyla A matrisini, sonra sütunlarla B matrisini, sonra iki matrisi oluştururuz. ATB'nin ürünü, dönüşümün sonucudur ve ATB'nin m'inci sütunu, A'daki m'inci sütunun sonucudur.
Matematiksel ifade şöyledir:
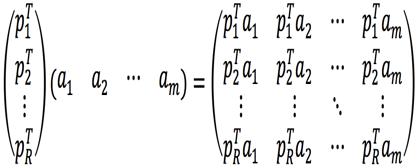
Pi, i'inci temeli temsil eden bir sütun vektörü ve a, j'inci orijinal veri kaydını temsil eden bir sütun vektörüdür. Burada R, N'den küçük olabilir ve R, dönüştürülen verilerin boyutluluğunu belirler. Başka bir deyişle, N boyutlu bir veriyi daha düşük boyutlu bir uzaya dönüştürebiliriz ve dönüştürülen boyut, baz sayısına bağlıdır. Bu nedenle, matris çarpımının bu temsili aynı zamanda boyut indirgeme dönüşümünü de temsil edebilir.
2. Kovaryansın anlamı
Varyans, tek boyutlu bir veri örneğinin ortalamadan sapma derecesini tanımlar:

Benzer şekilde, aşağıdaki forma geçerseniz, bu kovaryanstır, Kovaryans, iki rastgele değişken arasındaki ilişkiyi ölçmek için kullanılan bir istatistiktir.Anlaşılması kolay değilse, iki vektörün iç çarpımının anlamından anlaşılabilir. Açı ne kadar küçükse, değer o kadar büyük ve yön o kadar yakın olur. Daha olumlu korelasyon.

Kovaryans, iki değişken arasındaki ilişkidir. N değişken varsa, aralarındaki kovaryans hesaplanmalıdır ve bu bir kovaryans matrisi ile temsil edilebilir. C, farklı boyutlar (bileşenler) arasındaki ilişkiyi açıklamak için bir ölçü olarak kullanılabilir. Farklı bileşenler arasındaki korelasyon daha küçükse, C'nin köşegen dışı elemanının değeri daha küçüktür Özellikle, farklı bileşenler birbiriyle ilişkili değilse, o zaman C köşegen bir matris olur.
3. PCA'nın geometrik anlamı
Wikipedia'daki Temel Bileşen Analizinin (PCA) matematiksel tanımı, verileri yeni bir koordinat sistemine dönüştüren dikey bir doğrusal dönüşümdür, böylece bu verilerin herhangi bir projeksiyonunun ilk en büyük varyansı ilk sıradadır. Bir koordinatta (birinci ana bileşen olarak adlandırılır), ikinci en büyük varyans ikinci koordinattadır (ikinci ana bileşen) ve bu böyle devam eder.
PCA, en yaygın kullanılan doğrusal boyutluluk azaltma yöntemidir. Amacı, yüksek boyutlu verileri belirli bir doğrusal projeksiyon aracılığıyla düşük boyutlu bir alana eşlemek ve öngörülen boyuttaki verilerin en büyük varyansının kullanılmasını beklemektir. Daha orijinal veri noktalarının özelliklerini korurken daha az veri boyutu.

Yalnızca bir boyuta indirgenirse, x eksenine projeksiyon yaptığınızda en soldaki iki noktanın üst üste geleceği ve ortadaki iki noktanın da üst üste geleceği görülebilir. 4 farklı iki boyutlu noktanın izdüşümünden sonra Yalnızca iki farklı değer kaldı ve bilgiler ciddi şekilde kaybolur Benzer şekilde, en üstteki iki nokta y eksenine yansıtılırsa ve x ekseni üzerinde dağıtılan iki nokta üst üste gelir. Öyleyse, x ve y eksenlerinin en iyi izdüşüm seçenekleri olmadığı görülmektedir.
Aşağıda, bu sorunu ifade etmek için matematiksel yöntemler kullanıyoruz.
Varsayımsal örnek set

, Yeni uzaydaki hiper düzlemdeki örnek noktaların izdüşümü WTxi'dir.Tüm örnek noktalarının projeksiyonları mümkün olduğu kadar ayrılabilirse, projeksiyondan sonra örnek noktalarının varyansı maksimize edilmelidir.Örnek noktaların projeksiyondan sonraki varyansı şu şekilde ifade edilebilir:
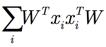
Dolayısıyla optimizasyon hedefi şu şekilde yazılabilir:

Lagrange Multiplier'ı kullanın

Sadece XXT kovaryans matrisi üzerinde özdeğer ayrıştırması gerçekleştirmeniz, elde edilen özdeğerleri sıralamanız gerekir: 12 ... n ve sonra W = (w1, w2, ... oluşturmak için ilk d özdeğerlere karşılık gelen özvektörleri alınız. , wd), temel bileşen analizinin çözümüdür.
İkinci olarak, özyüz yöntemi fikri
Görüntü tanımanın temel fikri aynıdır: Önce uygun bir alt uzay seçin, tüm görüntüleri bu alt uzaya dönüştürün ve sonra bu alt uzaydaki benzerliği ölçün veya sınıflandırma öğrenimi gerçekleştirin. Öyleyse neden mekansal dönüşüm gerçekleştirmemiz gerekiyor?
SVM'deki çekirdek işlevinin boyutsal yükseltmesine benzer şekilde başka bir alana dönüştürmenin iki etkisi vardır:
- Aynı kategorideki görüntüler daha yakın
- Farklı görüntü türleri çok uzakta olacak
Bu şekilde, orijinal piksel uzayında doğrusal bir sınıflandırıcı ile ayrılması zor olan farklı kategorilerdeki görüntüler, yeni uzayda kolaylıkla ayrılabilir. Neden orijinal piksel alanında birbirlerine çok yakın değiller ve birbirinden çok uzak değiller veya ayrılmaları o kadar kolay değil? Aydınlatma, görüş açısı, arka plan ve şekil gibi farklılıklar dahil olmak üzere görüntüdeki çeşitli faktörlerin etkisinden dolayı, aynı hedefin görüntüsü görsel bilgilerde çok farklı olacaktır.
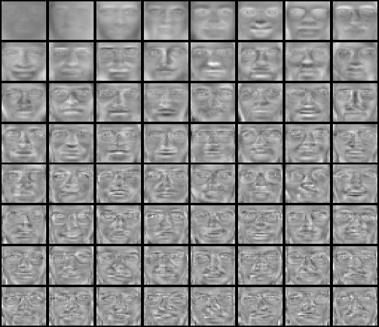
Özyüz teknolojisinin temel fikri şudur: İstatistiksel bir bakış açısıyla, yüz görüntülerinin dağılımının temel unsurlarını, yani yüz görüntüsünü temsil etmek için yüz görüntüsü örnek setinin kovaryans matrisinin özvektörlerini bulmak. Bu özellik vektörlerine Özyüzler denir.
Aslında özyüz, yüz örnekleme setinde saklı bilgiler ile yüz arasındaki yapısal ilişkiyi yansıtır. Gözler, yanaklar ve çenelerden oluşan örnek setin kovaryans matrisinin özvektörlerine, topluca karakteristik alt yüzler olarak adlandırılan karakteristik gözler, karakteristik çeneler ve karakteristik dudaklar denir. Özellik alt yüzleri, özellik yüzlerinin görüntü uzayında alt yüz uzayları adı verilen karşılık gelen alt boşlukları oluşturur.
Üçüncüsü, mekansal yapı
Dünyada iki özdeş yaprak yok. Farklı şeyleri ayırt etmek istiyorsak, yalnızca belirli bir temsilde (uzayda) aynı tür hedeflerin benzersiz ortak yönlerini bulmamız gerekir.
Özyüz yönteminin, yüzü piksel alanından başka bir alana dönüştürmesi ve diğer boşluktaki benzerliği hesaplaması gerekir. Bu mekan nasıl inşa ediliyor?
- Birincisi, insan yüzlerinin ortaklığını bulmak.
- İkincisi, birey ile müştereklik arasındaki farkı bulmaktır.
- Ortak alan uzaydır ve birey vektördür
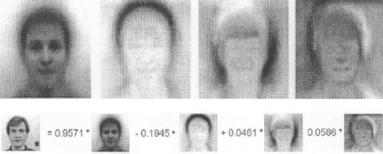
İlgili özvektörleri elde etmek için hedef kümedeki tüm yüz görüntülerinin kovaryans matrisinde özdeğer ayrışımı gerçekleştirin Bu özvektörler "özyüzler" dir. Her özellik vektörü, yüzler arasındaki bir değişikliği veya özelliği yakalar. Bu nedenle, her insan yüzü bu karakteristik yüzlerin doğrusal bir kombinasyonu olarak ifade edilebilir. Her özellik alt yüzüne dayalı uzayda, her yüz bir noktadır ve bu noktanın koordinatları, her özellik tabanının altındaki yüzün öngörülen koordinatlarıdır.
Dördüncü olarak, özyüz algoritması süreci
Aşağıdakiler, öz yüze dayalı olarak yüz tanımanın gerçekleşme sürecini doğrudan verir:
1) Yüz görüntü verisi II elde edin ve her yüz görüntüsü matrisini satırlar halinde bir boyuta dizin, her yüz bir vektördür
2) Karşılık gelen boyutlarda M yüzü ekleyin ve "ortalama yüz" ü elde etmek için bunların ortalamasını alın

3) Her görüntüden ortalama yüz vektörünü çıkarın

4) Kovaryans matrisi C'yi hesaplayın
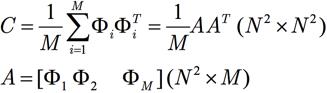
5) Kovaryans matrisinin özdeğer ayrışımı

Yüzün özellik boyutu, 256x256 yüz görüntüsü gibi büyükse, N 65536 olacaktır. M birey varsa, kovaryans matrisi C'nin boyutu NxM = 65536xM'dir. Bu büyük matrisin özdeğer ayrışımını çözmenin hesaplama karmaşıklığı çok büyük. Çok fazla yüz örneği M yoksa, ATA'yı düşünün, bu matris o kadar büyük değildir. Aşağıdakiler türetilmiştir:
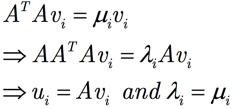
- AAT en fazla N2 özdeğerine ve özvektörüne sahip olabilir;
- AT A, en fazla M özdeğerine ve özvektörüne sahip olabilir;
- AT A'nın M özdeğerleri, M AAT'nin en büyük özdeğerlerine karşılık gelir;
- M en iyi öznitelik vektörlerini hesaplayın ui = Avi;
- Yalnızca K özellik vektörlerini alın.
6) Yüz tanıma için Özyüzleri kullanın
1. Standardizasyon

2. Eşleme özelliği alanı

3. olarak yeniden ifade edildi

4. Ölçüm mesafesi

5. Eğer

Tanınan görüntünün l'inci yüzü olduğu kabul edilir.
Beşinci olarak, algoritma uygulaması
1. Eğitim resmi:

2. Ortalama yüz:

3. Özellik alt yüzü:
4. Görüntü rekonstrüksiyonu:
5. Benzerliği yüksek yüz resimleri aranıyor:

2015 yılında, Almanya'nın Hannover kentinde düzenlenen Tüketici Elektroniği Fuarı'nın açılış töreninde, Alibaba'nın yönetim kurulu başkanı Jack Ma, yüz tanıma teknolojisini dış dünyaya ilk kez gösterdi: yüzünü makinenin tanıma çerçevesine yerleştirdi ve sistem otomatik olarak onu tanıdı ve ödemeyi tamamladı. 1948 Hannover Endüstri Fuarı'nın hatıra pulu kendisi için başarıyla satın alındı. Şimdi bu sadece yüzü kaydırarak ödeme değil, aynı zamanda yüzü kaydırma modu çeşitli "giriş" seviyelerine uygulandı ve başarıyla uygulandı. Gelecekteki formlar daha çeşitli ve heyecan verici olacak!
