Boston Dynamics insan benzeri dengeye ulaşıyor! Yeni algoritma, robotların düşme lanetinden kurtulmasına yardımcı oluyor
Bu sefer önce denemeyi öğrendi Sonra bir sonraki adımı nasıl atacağınıza karar verin.
Birisi insanların iki ayaklı robotlarla ilgili ilk izlenimlerini sayarsa, " Düşmesi kolay "Kesinlikle ilk üçe girecek.

Ancak yeni nesil iki ayaklı robotlar sizi kesinlikle şaşırtacak. Günümüzde sadece dengeli bir şekilde yürüyemiyorlar, hatta ülkeyi geçebiliyorlar.
Florida İnsan-Bilgisayar Biliş Enstitüsü yeni bir kontrol algoritması aracılığıyla
(Florida İnsan ve Makine Bilişi Enstitüsü, IHMC) Robotik Laboratuvarı Sağlanan antropomorfik denge .
Algoritmanın testinde Boston Dynamics'in Atlas robotu kullanıldı. Algoritmanın kontrolü altında, Atlas artık sağlam bir beton tuğla yolda durmadan yürüyebilir. Hareketli resimden, Atlas'ın davranışının temelde insanlarınkiyle aynı olduğunu görebiliriz: Zeminin taşıma kapasitesine karar vermek için ilk önce ayağa hafifçe basın ve ardından dengeyi sağlamak için gövdeyi ve kolları ayarlayın. .
Bu teknolojiyi açıklayan bir makalede, araştırmacılar " Robot, ayağın merkezine baskı uygulayarak temas yüzeyini keşfeder, keşif aşamasında ayağın dönüşüne göre kuvveti taşıyabilecek bir denge noktası çizer. Robot, keşif ve hesaplama yoluyla nasıl "aşağı inileceğine" karar verebilir. Ayrıca dengesini korumak veya yeniden kazanmak için kollarını sallamak gibi üst vücut hareketlerini kullanır. Testte, engebeli beton tuğla yollarda yürüyebilir.
Robot daha az sağlamlıkla çakıl zeminde yürüdüğünde, dengesini korumak için genellikle ayak bileğinin dönüşüne güvenerek zeminin eğimine uyum sağlar; ancak, arazi nispeten keskin olduğunda, yere uyum sağlamak için ayak bileğinin dönüşüne güvenmek ayak bileği eklemi rotasyon sınırına kolayca ulaşabilir. Bu, makineye zarar verir.
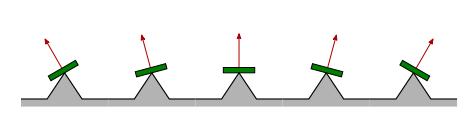
Robot, zemine keskin bir çizgi veya nokta temasından geçer: ilk olarak, zeminin eğimine sıkı bir şekilde uyum sağlamak yerine ayağı yatay yöne yakın tutun ve ardından ayağın kaymasını önlemek için etkili temas yüzeyinin normal yönünü değiştirmek için ayak bileğini kademeli olarak döndürün.
Yeni kontrol algoritmasında araştırmacı, robotun ayaklarını zeminin eğimiyle tam olarak aynı hizada olmak yerine yatay yöne yaklaşacak şekilde kontrol eder.Dengeyi sağlamak için, ayak yönünü temas çizgisine paralel tutmak için pozisyon kontrolü kullanılır ve kullanılır Temas hattına dik olan tork, temas hattındaki basınç merkezini dönüştürür (Polis). Ayak bileği döndürülerek, ayağın kaymasını önlemek için etkili temas yüzeyi normal yönü buna göre değiştirilir.
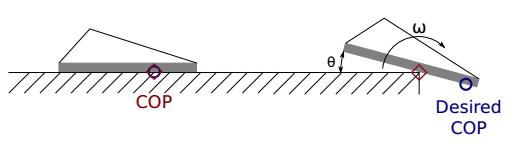
Tahmini arazi temel noktası ve optimum basınç merkezi (CoP)
Mevcut araziyi tahmin edin Robot dengelenirken ve yürürken basınç merkezinin (CoP) nasıl yerleştirileceği çok önemlidir. Arazi durumu bilinmediğinde, robotun attığı her adımda, bir sonraki dayanak noktasını tahmin etmesi gerekir.
Önce tüm ayağın zemine temas ettiğini varsayın ve ardından robot, ayağının temel alanındaki yerel basınç merkezini hesaplamaya başlar.Eğer beklenen basınç merkezi (İstenen CoP) ayağın zeminden desteklendiği bölgede bulunuyorsa, kesin basınç merkezi buna çok yakın olacaktır. Beklenen basınç merkezi; ancak, beklenen basınç merkezi ayağın yerden desteklenmediği bölgede olduğunda, arazi tahminini iyileştirmek, yani ayağın ağırlığı taşıyamayan kısmını çıkarmak için ayağı ve bileği döndürmeniz gerekir. Araştırmacılar ayak bileğinin dönme hızını ölçüyor veya ayak sesi ve yer geometrisine göre ayağın dönme hareketini tespit ediyor.


Simülasyon diyagramı: Atlas robotu, rastgele yönlerde (yukarıda) ve noktalı temel noktalarında (altta) doğrusal basamaklı taşların üzerinde yürür.Her adım yeni bir temel noktası tahmin edecek ve kontrol algoritması robotun hızını buna göre ayarlayacaktır.
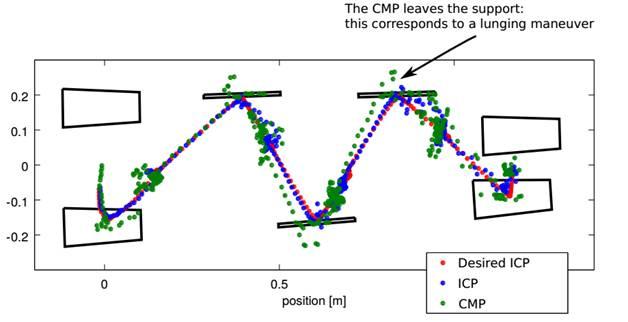
Soldan sağa yürüyen Atlas robotunun yer referans noktasının gerçek verileri (üstten görünüm): siyah çokgen, hat uydurmanın temel alanını, kırmızı nokta beklenen anlık yakalama noktasını (İstenen ICP) ve mavi nokta, gerçek anlık yakalama noktasını (ICP) ifade eder. ), yeşil nokta robotun kütle merkezi moment eksenini (CMP) ifade eder.
Araştırmacılar, başarılarının " İki ayaklı robotları gerçek dünyada daha pratik hale getirecek "Elbette, tıpkı insanlar gibi robotların yargıları da yanlış olabilir. Ancak araştırmacılar, robotların güvenli bir şekilde düşmesini nasıl sağlayacaklarını incelemeye başladılar ve insanlar gibi, onlar da bir düşüşle kolayca aptalca düşmeyecekler. Arızalı devre kartı).
IHMC kağıt adresi: https://arxiv.org/pdf/1607.08089v1.pdf