Yerli AEB inişinden analiz: kamera ve milimetre dalga radarının füzyon teknolojisi
Leifeng.com'un yeni akıllı sürüş notu: Bu makalenin yazarı, Wuhan Jimu Intelligent Technology Co., Ltd'nin CEO'su Cheng Jianwei, Wuhan'ın "Optik Vadisi 3551 Yetenek Programı" na seçildi; 2011'den beri görsel ADAS geliştirme ile uğraşıyor. Leifeng.com sadece yeni Zhijia'yı piyasaya sürdü. Yeniden basmak için lütfen yetkilendirme ile iletişime geçin.
Sensör füzyonu, akıllı sürüşün kaçınılmaz bir eğilimi olarak kabul edilir. Geçtiğimiz iki yılda, Ulaştırma Bakanlığı'nın politikasının teşvik edilmesi altında, AEB (Otomatik Acil Durum Freni) dahil olmak üzere bazı ticari araçlara bazı L1 ve L2 ADAS işlevlerinin kurulması gerekmiştir. Burada ticari araçlarda AEB kullanımı ile sensör füzyonundan bahsedeceğim.
AEB'nin teknik gerçekleştirme yöntemi
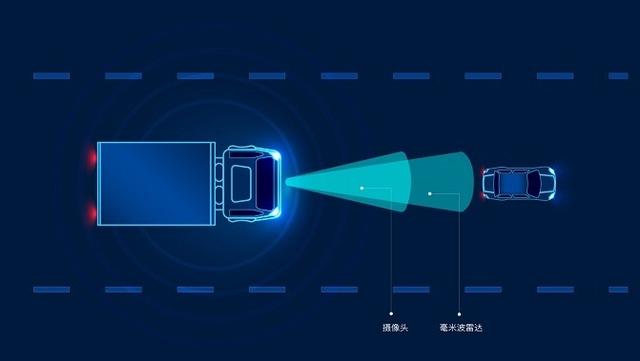
Şu anda, görme sensörleri, milimetre dalga radarları ve lidarlara dayanan AEB'ye ulaşmak için üç ana teknoloji türü vardır. Maliyet kısıtlamaları nedeniyle, ilk iki yöntem esas olarak Çin'de kullanılmaktadır. Görüş sensörleri ve milimetre dalga radarları, araçların AEB işlevini yerine getirmek için farklı prensiplere sahiptir: milimetre dalga radarları esas olarak hedef nesneye elektromanyetik dalgalar göndererek ve yankıyı alarak hedef nesnenin mesafesini, hızını ve açısını elde eder. Görme şeması biraz daha karmaşıktır.Monoküler görme şemasını örnek olarak alın.Önce hedefi tanıması ve ardından görüntüdeki hedefin piksel boyutuna göre hedefin mesafesini tahmin etmesi gerekir.
Her iki tür teknolojinin de kendi avantajları ve dezavantajları vardır. Genel olarak konuşursak, kamera çözümü düşük maliyetlidir ve farklı nesneleri tanıyabilir.Nesne yüksekliği ve genişliği ölçüm doğruluğu, şerit çizgisi tanıma, yaya tanıma doğruluğu vb. Avantajlara sahiptir ve şeritten ayrılma uyarısı, trafik işareti tanıma ve diğer işlevleri gerçekleştirmek için vazgeçilmezdir. Sensör, ancak menzili ve doğruluğu milimetre dalga radarı kadar iyi değildir ve ışık ve hava gibi faktörlerden kolayca etkilenir. Milimetre dalga radarı, aydınlatma ve hava faktörlerinden daha az etkilenir ve yüksek bir hassasiyete sahiptir, ancak şerit çizgileri ve trafik işaretleri gibi unsurları tanımlamak zordur. Ek olarak, milimetre dalga radarı, Doppler kayması prensibi ile daha yüksek hassasiyetli hedef hız tespiti yapabilir.

Dolayısıyla, kamera ve radarı entegre eden ve birbiriyle işbirliği yaparak otomobilin algılama sistemini oluşturan, birbirini tamamlayabilen ve daha kararlı ve güvenilir bir AEB işlevi gerçekleştiren üçüncü bir çözüm var.
Entegrasyon planı aynı zamanda yerli ticari araç AEB'nin uygulanması için zorunlu bir gerekliliktir. JT / T 1094-2016 "Ticari Yolcu Araçlarının Güvenliği için Teknik Koşullar" da, uzunluğu 9 metreden daha uzun olan ticari binek otomobilinin JT / T 883'e uygun olarak Şeritten Ayrılma Uyarı Sistemi (LDWS) ve AEB (önceki araç çarpışma uyarısı dahil) ile donatılacağı belirtilmektedir. sistemi). Ulaştırma Bakanlığı Genel Müdürlüğü tarafından yayınlanan "Çalışan Binek Araçların Emniyetinin Doğrulanmasına İlişkin Uygulama Yönetmeliği" nde çalışan binek araç kabininin ön kapağının AEBS milimetre dalga radarı veya lidar cihazı ile donatılması gerektiği açıkça istenmektedir. Gelecekte, diğer ticari araç modellerinin yaygınlaştırılmasını teşvik edecek politikalar getirilecek ve gelecekte binek araçların kapsamı genişletilebilir.
Sensör veri füzyonunun ilkeleri ve avantajları
Füzyon şemasını benimsedikten sonra, kamera ve radar, birbirini tamamlayabilen farklı algılama bilgileri elde edecek, ancak çelişkiler de olabilir. Farz edelim ki, belli bir senaryoda, aracın yaklaşık 50 metre önünde frenlenmesi gereken özel şekilli bir arabanın olduğu, ancak radarın aynı bilgiyi geri beslemediği, bu tür çelişkili bilgiler aracı kayıp haline getirebilir. Bu nedenle, araç kontrol merkezinin tutarlı ve net eylem talimatları alabilmesi için sensör verilerinin sigortalanması gerekir.
Sensör veri füzyonunun temel ilkesi, insan beyninin gözler, burun, kulaklar vb. Gibi birden çok organdan gelen kapsamlı bilgileri işlemesine benzer. Esas olarak, birden çok sensör tarafından elde edilen verileri ve bilgileri entegre eder ve birden çok sensörü, uzay veya zamandaki fazlalık veya tamamlayıcı bilgilere dayandırır. Ölçülen nesnenin tutarlı bir tanımını elde etmek için belirli kriterleri birleştirin.
Sürüş sahnesine geri dönersek, süreç kabaca şu şekildedir: önce, kamera ve milimetre dalga radarı, gözlem hedefi için ayrı ayrı veri toplar ve ardından her sensörün çıktı verileri üzerinde özellik çıkarma ve örüntü tanıma işlemi gerçekleştirir ve hedefi kategoriye göre doğru bir şekilde ilişkilendirir ve son olarak Füzyon algoritması, hedefin tehdidi hakkında tutarlı bir sonuca varmak için aynı hedefin tüm sensör verilerini entegre etmek için kullanılır.
Jimu Smart'ın görüş ve radar füzyon sistemini örnek olarak alın. Aşağıdaki şekilde gösterildiği gibi, şekildeki mavi ve yeşil noktalar sırasıyla aynı hedefin kamera ve milimetre dalga radarı tarafından algılanmasıdır.Kamera esas olarak hedef görünüm kilidinden sorumludur ve milimetre dalga radarı esas olarak menzilden sorumludur. Kırmızı noktalar, radar tarafından tespit edilen diğer yer nesneleridir.
Veri füzyonu için farklı stratejiler de vardır: Örneğin, bazı programlar farklı sensörler tarafından oluşturulan hedef verileri birleştirmeyi seçecek ve bazıları, bazı ham verilerin kaybını önlemek için farklı sensörlerin ham verilerini birleştirmeyi seçecektir. Akıllı sürüş senaryosunda, görüş ve milimetre dalga radarının veri birleşmesi için kabaca üç strateji vardır: görüntü seviyesi, hedef seviyesi ve sinyal seviyesi.
Görüntü düzeyinde füzyon, vizyonu ana gövde olarak alır, radarın genel bilgi çıktısını görüntü özelliklerine dönüştürür ve ardından bunu, görüş sisteminin görüntü çıktısıyla birleştirir; hedef düzeyinde füzyon, görüş ve radar çıktısının kapsamlı güvenilirlik ağırlıklandırmasıdır ve koordinasyonun doğruluğu Kalibrasyon bilgileri kaynaştırılır ve uyarlanabilir arama ve eşleştirmeden sonra verilir; sinyal düzeyinde füzyon, veri kaynağını görüş ve radar sensörü ECU'sundan birleştirmektir. Bunlar arasında, sinyal düzeyinde füzyon veri kaybı en küçük ve güvenilirlik en yüksek olanıdır, ancak çok fazla hesaplama gerektirir.
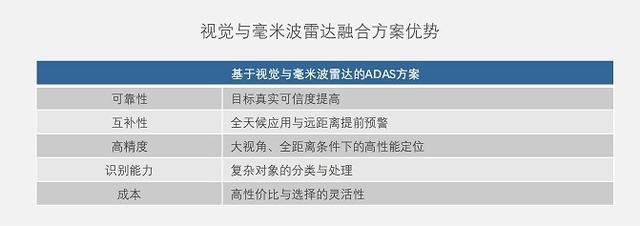
Test verileri, tek görüşlü veya tek radar çözümleriyle karşılaştırıldığında füzyon çözümünün sistem güvenilirliği ve sağlamlığı, veri güvenilirliği ve sistem çözünürlüğü açısından avantajları olduğunu göstermektedir.
Görüş ve milimetre dalga radar füzyonunun teknik temeli
Sensör füzyonu, akıllı sürüşün kaçınılmaz bir eğilimi olarak kabul edildi. Görüş ve milimetre dalga radarının veri füzyonunu gerçekleştirmek için, sistematik bir görüntü ve radar veri toplama ve işleme teknolojisi sistemi gibi bazı teknik temeller ve veri işleme ve hedef sınıflandırma ve tanıma düzeyinde bilgi füzyon algoritmalarının optimizasyon ve tasarım yetenekleri gereklidir. ve daha fazlası. Mevcut yerli görsel algılama teknolojisinin milimetre dalga radarından daha olgun olduğu gerçeği göz önüne alındığında, görsel teknoloji şirketleri için harici radar platformlarıyla entegre olduklarında, bilgiyi en üst düzeye çıkarmak için radar sistemleri için mükemmel ikincil geliştirme yeteneklerine sahip olmaları gerekir. Kullanım oranı.
Görüş ve milimetre dalga radarının birleşmesi için, teknik gerçekleştirmedeki temel zorluklar, kamera ve radar gözlemlerinin eşleştirilmesi, veri füzyonu ve çok hedefli senaryolarda etkili hedef kütüphanelerinin bakımıdır.Hata toleransı, esneklik, ölçeklenebilirlik, Güvenilirlik, kurulum ve diğer birçok faktör.
Bilgi füzyon teknolojisinin gerçekleştirilmesi, ekipman çıktısı, gerçek değer kalibrasyonu ve ikincil veri geliştirmeyi içeren çok sayıda sürücü testi ile sürekli işbirliği gerektirir. Karşılık gelen veri toplama, veri depolama, veri etkileşimi ve veri işleme iş yükleri çok büyük. Ar-Ge kurumları için Şirketin kapsamlı geliştirme yetenekleri yüksek gereksinimlere sahiptir.
Son olarak, sensör veri füzyonunun temel anahtarı, uygun bir füzyon algoritması benimsemektir. Ortaya çıkan bir alan olarak, veri füzyonunun şu anda birleşik bir teori ve genelleştirilmiş etkili füzyon modeli ve algoritması yoktur.Özel senaryolara göre seçilmesi gerekir.Ancak sinir ağları ve yapay zeka gibi yeni teknolojilerin sensör veri füzyonunda daha önemli bir rol oynayacağı öngörülebilir. Giderek daha önemli bir rol. Bu aynı zamanda, çeşitli endüstri katılımcıları için teknik engellerin ve temel rekabet gücünün yaratılmasının anahtarıdır.
Leifeng.com tarafından önerilen okuma: "JiMu Smart, Mobileye'ı neden yeniyor ve Golden Dragon'u büyük sipariş kazanıyor? ADAS endüstrisini nasıl derinleştireceksiniz?