Yuan Rong Qixing'in derin öğrenme ağı modeli ve çıkarım motoru "tuğlaların" L4'ten çıkmasına neden oldu | CVPR 2020

Otonom sürüş, teknolojik bir sınırdır ve sektörün içindekiler sürekli olarak keşfediyor ve atılımlar yapıyor.
Leifeng.com geçtiğimiz günlerde, bir L4 otonom sürüş çözümü sağlayıcısı olan Yuan Rong Qixing'in 3 boyutlu nesne algılama üzerine bir makalesinin CVPR 2020'ye dahil edildiğini öğrendi. Yuan Rong Qixing'in derin öğrenme ağı modeli HVNet.
Birden fazla yöntemle karşılaştırıldığında, HVNet, 3B nesne algılamanın hızı ve doğruluğunda önemli bir gelişmeye sahiptir.
CVPR (Bilgisayarla Görme ve Örüntü Tanıma Konferansı, yani IEEE Uluslararası Bilgisayarlı Görü ve Örüntü Tanıma Konferansı), bilgisayarla görü üzerine dünyanın en iyi akademik konferansıdır. Bu yıl, CVPR toplam 6,656 başvuru aldı ve yalnızca 1,470 makale kabul edildi ve kabul oranı yalnızca% 22 oldu ve son on yıldaki en düşük CVPR kabul oranını belirledi.
Otonom sürüş, yapay zekanın önemli bir uygulama alanıdır ve derin öğrenme, yapay zekayı gerçekleştirmek için kullanılan temel bir teknolojidir. Derin öğrenme, iki ana süreci içerir: her ikisi de derin öğrenme-derin öğrenme ağ modelinin (bundan sonra model olarak anılacaktır) temel unsurları etrafında geliştirilen eğitim ve çıkarım. Eğitim, modelin eğitilmesi ve modele ağırlıkların atanması (farklı düğümler) anlamına gelir Çıkarım, eğitilmiş modeli yepyeni veriler hakkında akıl yürütmek ve doğru cevabı almak için kullanma sürecini ifade eder. Cevabın doğruluğu doğrudan model ve akıl yürütmeyle ilgilidir.

Derin öğrenme diyagramı
L4 otonom sürüş için derin öğrenme modeli
Otonom sürüşte derin öğrenme, aracın karar verme ve kontrolü için yargı verilerini sağlamak üzere aracın etrafındaki nesneleri algılamak için kullanılır. 3B nesne algılama, mevcut algılama modülünün çok önemli bir parçasıdır. Otonom sürüşün güvenliğini sağlamak için, 3B nesne algılamanın en önemli görevi, sistemin gerçek zamanlı olarak hızlı bir şekilde tanımlayıp yanıt verebilmesi için doğruluğu ve zaman alıcıyı dengelemektir.
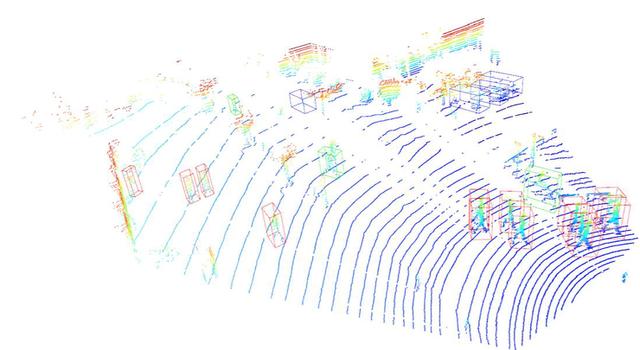
3B nesne algılama
3B nesne algılamayı hedefleyen Yuan Rong Qixing, nokta bulutu tabanlı 3B nesne tespiti için yeni bir birleşik ağ modeli önerdi: bir hibrit voksel (hacim pikseli, üç boyutlu uzay bölümlemedeki en küçük dijital veri birimi) ağı-HVNet aracılığıyla Nokta seviyesinde, voksel özellik kodlayıcı (VFE) karıştırılarak daha iyi bir voksel özellik kodlama yöntemi elde edilir, bu da 3D nesne algılamanın hızını ve doğruluğunu artırır.

O'nun HVNet olduğu KITTI test setinde hız-doğruluk karşılaştırma tablosu
Yuan Rong Qixing, KITTI veri seti üzerinde deneysel doğrulama gerçekleştirdi. KITTI veri kümesi şu anda dünyadaki otonom sürüş için geçerli en büyük bilgisayarla görme algoritması değerlendirme veri kümelerinden biridir. Beş senaryoyu kapsar: şehirler, yerleşim alanları, yollar, kampüsler ve yayalar. L4 otonom sürüş algılama algoritmaları için en önemli testtir. Değerlendirme yöntemlerinden biri.
Aşağıdaki şekilden de görülebileceği gibi, KITTI veri seti deneyinde, HVNet, zor ve orta bisiklet algılama modunda birinci, otomobil algılama orta modunda ise altıncı sırada, Apple ve UberATG gibi şirketleri geride bıraktı.

HVNet'in KITTI testindeki BEV puanı (Bisiklet, Kasım 2019)

HVNet'in KITTI testindeki BEV puanı (Otomotiv, Kasım 2019)
Yuan Rong Qixing Algılama Teknoloji Direktörü Cao Tongyi şunları söyledi: "Çok sınıflı nesne algılamada, birçok yöntem farklı sınıfları algılamak için birden çok model eğitiyor. Çıkışı yalnızca tek bir ağ üzerinden tamamlıyoruz. KITTI'nin çok sınıflı algılama görevinde, Gerçek zamanlı verimlilik sağlarken, o anda en iyi haritayı (ortalama doğruluk) elde etti. PointPillars ve Second gibi algoritmalarla karşılaştırıldığında, HVNet ayrıca verimlilikte büyük bir atılım yaptı. "

KITTI val veri setinde BEV üzerinde farklı voksel ayarları altında sonuçların karşılaştırılması
Verimli gerçek zamanlı akıl yürütme motoru
Yüksek performanslı bir modelle, otonom sürüş algısı başarının yalnızca yarısıdır. Otonom sürüş sistemi, yalnızca verimli ve doğru mantık tamamlandığında çevredeki nesneleri doğru bir şekilde yargılayabilir. Yuanrong Qixing, HVNet ile daha iyi eşleşmek için, HVNet'in özel operatörleri ve ağ yapısı için hesaplama kaynaklarını optimize eden çıkarım motoru DeepRoute-Engine'i de geliştirdi, böylece otonom sürüş algoritmaları düşük maliyetle, Düşük güçlü bir donanım platformunda verimli ve istikrarlı bir şekilde çalışır.
Temel derin öğrenme çerçevelerindeki çıkarım motorları ile karşılaştırıldığında, DeepRoute-Engine, ister basit bir evrişim tabanlı görüntü modeli ister çok sensörlü bir füzyon modeli olsun, mükemmel optimizasyon etkilerine sahiptir. Aksine, karmaşık çoklu sensör modelleri için daha yüksek çıkarım hızına sahiptir.

DeepRoute-Engine ve genel bilgi işlem çerçeveleri arasındaki çıkarım hızının karşılaştırılması
Çıkarım motorları için en önemli performans göstergesi zaman alıcıdır. Çünkü yalnızca çıkarım motoru, aracın etrafındaki nesnelerin türlerini ve özelliklerini gerçek zamanlı olarak belirlediğinde, sistem, aracın gerçek zamanlı kontrolünü sağlamak ve otonom araçların güvenliğini sağlamak için yeterli tepki süresine sahip olabilir. Bu nedenle, endüstri aynı zamanda akıl yürütmeye daha fazla önem veriyor: NVIDIA'nın otonom sürüş için Xavier yongası gibi birçok donanım ve yazılım çözümü daha hızlı hızlanmayı teşvik etmeye odaklanıyor ve Intel'in Mobileye EyeQ 5'i piyasaya sürdü.
Uyumluluk açısından DeepRoute, Nvidia, Intel ve AMD gibi markaların bilgi işlem platformlarını destekleyebilir. DeepRoute-Engine ayrıca PyTorch, Caffe, TensorFlow ve diğer derin öğrenme çerçevelerine iyi bir şekilde uyarlanabilir.Farklı çerçevelerle eğitilen modellerin tümü, çıkarım için DeepRoute-Engine kullanabilir.

Çıkarım motoru uyumluluk karşılaştırması
DeepRoute-Engine ayrıca gerçek zamanlı veri türü dönüştürme mantığını da destekler.Bir dizi modeli dağıtırken, doğruluk çalışma zamanında ayarlanabilir, bellek alanı işgalini azaltır ve dağıtım verimliliğini artırır. DeepRoute-Engine, yüksek ölçeklenebilirlikle özel katman füzyonunu ve kullanıcı eklentilerini destekler.
Bununla birlikte, otonom sürüşün gerçekleştirilmesi nedeniyle, yalnızca mükemmel AI teknolojisi gerekli olmakla kalmaz, aynı zamanda sanayileşmeyi gerçekten başarmak için maliyet ve güç tüketimi de kontrol edilmelidir.
Şu anda, sektörde çıkarım hızı için minimum gereksinim 10 fps'dir. Ancak düşük güçlü bilgi işlem platformu ürünleri için bu büyük bir zorluktur. PyTorch gibi ana akım çerçeveleri örnek olarak alırsak, düşük güçlü bilgi işlem platformu ürünlerinde mantık yürütmek için karmaşık modeller kullandıklarında, hesaplama hızı genellikle bu gereksinimi karşılayamayan 10 fps'den daha düşüktür.
Yuan Rong Qixing, bu sorunu kendi geliştirdiği verimli bir akıl yürütme motorunun yardımıyla çözdü.
Yuanrong Qixing, Ocak 2020'deki CES sırasında yeni nesil bilgi işlem platformu çözümü olan DeepRoute-Tite'ı piyasaya sürdü. Platform yalnızca bir tuğla boyutundadır ve 45W güç tüketimiyle otonom sürüş için ilgili tüm algoritmaları çalıştırır. Yuan Rong Qixing tarafından geliştirilen yüksek verimli akıl yürütme motoru sayesinde, algoritma bu platforma aktarıldıktan sonra, sistem çevredeki engelleri gerçek zamanlı ve doğru bir şekilde belirleyebilir, gerçek zamanlı olarak yanıt verebilir, şehir içi yolların maksimum hız sınırına yakın bir hızda gidebilir ve esnek bir şekilde tamamlanmış trafik ışıkları Tanıma, dönüş, engellerden kaçınma ve diğer işlemler.
Yuan Rong Qixing, otopilot yol testi videosu (2 kat hızlanma) yürütmek için düşük güçlü bir bilgi işlem platformu kullanıyor
Şu anda, tüm otonom sürüş endüstrisi minyatürleştirme ve gömülü çözümlere doğru gelişiyor. Sensörlerin minyatürleştirilmesine ek olarak, aracın bagajındaki orijinal büyük ve yüksek güçlü bilgi işlem platformunu değiştirmek daha önemlidir.

Yuanrong Qixing'in yeni nesil bilgi işlem platformu DeepRoute-Tite
Verimli ve doğru kendi geliştirdiği modeller, kendi geliştirdiği akıl yürütme motorları ve düşük güç ve düşük maliyetli bilgi işlem platformlarının birleşimi, Yuanrong Qixing'in otonom sürüş çözümlerinin güvenlik, verimlilik ve maliyetle ilgili üç otonom sürüş seri üretim kısıtlamasını dengelemesini sağlar. Yalnızca teknolojinin güvenliğini sağlamakla kalmayan, aynı zamanda otomobilin bagaj boşluğunu da geri getiren faktörler, otonom sürüşün insanların hayatına büyük ölçekte daha hızlı girmesine olanak tanır.
Not: Yuan Rong Qixing, 16-18 Haziran 2020'de ABD'nin Seattle kentinde düzenlenen CVPR'de de yer alacak ve dünyanın her yerinden bilim adamlarıyla CV konularını tartışacak.Stand numarası: Island in Booth 645.
(Lei Feng Ağı) Lei Feng Ağı