İnsan vücudunda dolaşan küçük robot
1966'da yayınlanan Amerikan bilim kurgu filmi "Magic Journey" de, birkaç Amerikalı doktor denizaltını kırmızı kan hücrelerinden daha küçük bir boyuta indirdi ve beyni tıkayan kan pıhtılarını gidermek için kan damarları yoluyla beyne gönderdiler ve sonunda birini başarıyla kurtardılar. Bir bilim adamının hayatı.
Bu filmden, hastalıkları tedavi etmek için mikro robot kullanma kavramının uzun süredir ortaya çıktığını görmek zor değil. Geçmişte bu tür bir fikir ancak bilim kurgu eserlerinde karşımıza çıkabiliyordu, ancak teknolojinin gelişmesiyle birlikte insan vücuduna mikro robot yerleştirmenin hayal gücü yakında gerçekleşebilir.
Yakın gelecekte bir hastanede bir doktor gördüğümüzde, doktorların ilaç yazmasına ve ameliyat yapmasına gerek kalmıyor, vücudumuza mikro robotlar enjekte ediyor. Bu robotlar, insan vücudunda serbestçe yürüyebilir, plakla tıkanan arterlerin engelini kaldırabilir, biyopsi yapabilir veya içeriden kanser ve tümörleri tedavi edebilir.
"Küçük" meydan okuma
İdeal bir tıbbi mikro robotun boyutu yaklaşık olarak insan hücreleriyle aynıdır.Ameliyat ve kateterizasyon gibi geleneksel tıbbi yöntemlerle karşılaştırıldığında, mikro robotlar insan dokusuna neredeyse hiç zarar vermez. Mikro robotlar vücuttaki belirli hedefleri ve hedeflenen ilaç dağıtımını hedefleyerek ilaçların yan etkilerini de büyük ölçüde azaltabilir.
Tıbbi mikro robotların pek çok faydası olsa da bunu gerçekleştirmek o kadar kolay değildir. Mikro robotlar ile geleneksel robotlar arasındaki en büyük fark, çok küçük olmalarıdır. "Küçük" boyut, iki ucu keskin bir kılıçtır, avantajlar getirirken ciddi sınırlamalar da getirir. İnsan vücuduna enjekte edilebilen mikro robotun boyutu, herhangi bir güç kaynağı, sensör veya bilgisayar devresini kolayca entegre etmek için çok küçüktür. Büyük robotların spor yeteneği ve yapay zeka gibi bazı özellikleri mikro robotlar için zordur. Başlangıçta minyatür denizaltını hayal edelim.Bir hücre büyüklüğünde bir denizaltıya motor takılamaz ve denizaltının pervanesi işe yaramaz ve insan dokularının korunması nedeniyle geleneksel mekanik tahrikler (su altı pervaneleri gibi) kullanılamaz. In vivo robotta. Yoğun kanda denizaltının nasıl ilerlediği en büyük sorun haline geldi.

Ek olarak, küçük bir ölçekte, yüzey alanıyla ilgili etkiler daha belirgindir ve bu da mikro robotun hareketini daha da kısıtlar. Herhangi bir nesnenin hacmi ve yüzey alanı vardır ve yüzey alanının hacme oranı çok önemlidir. Genel olarak, nesne ne kadar küçükse, oran o kadar büyük olur. Bu nedenle, mikroskobik ölçekte, yüzey alanıyla orantılı olan etkiler (hava direnci gibi) daha büyük bir etkiye sahipken, hacimle ilgili etkiler (yerçekimi ve atalet gibi) daha küçük bir rol oynar. Örneğin, bazı böcekler boyut olarak küçüktür ve nispeten geniş bir yüzey alanına ve hacmine sahiptirler.Herhangi bir hasar vermeden yüksekten düşebilirler, çünkü böcekler alçalırken hava direncinden büyük ölçüde etkilenir, bu nedenle düştüklerinde son hızları büyük ölçüde azalır.
Küçük boyutun getirdiği zorluklara ek olarak, mikro robotların biyolojik olarak parçalanabilirliği ve biyouyumluluğu da önemli faktörlerdir. Küçük yabancı cisimlerin kalıcı olarak insan vücudunda kalmaması ve ciddi bir bağışıklık tepkisine neden olamaması nedeniyle, insan vücuduna giren herhangi bir materyal sıkı bir tarama gerektirir.
Mikro robotu etkinleştirin
Zorlukla karşı karşıya kalan bilim adamları, çok çeşitli mikro robot aktivasyon yöntemleri geliştirdiler. Birincisi ses dalgası tahriki, salınan ses dalgaları mikro robotun etrafındaki sıvıya etki ederek lokal sıvının her iki tarafındaki basıncın farklı olmasına ve mikro robotun hareket etmesine neden olur. Ayrıca tahrik sağlamak için kimyasal reaksiyonlarla üretilen mikro kabarcıkları kullanan kimyasal bir tahrik de vardır.
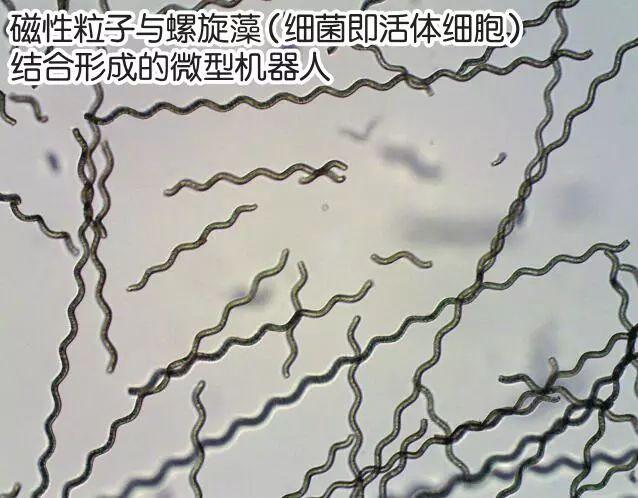
Kendi enerjisine ve hareketliliğine sahip canlı hücreler, belirli bakteri ve kas hücreleri gibi mikro robotlara da güç sağlayabilir. Mühendisler, canlı hücreleri insan yapımı mikro cihazlarla birleştirebilir ve çevredeki ortamın sıcaklığını, asitliğini ve ışık koşullarını değiştirerek onları uzaktan kontrol edebilir. Ancak bu yöntemle ilgili sorun, yalnızca kontrollü bir ortamda kullanılabilmesi ve insan ortamının çok fazla değiştirilememesidir.
En popüler robot sürüş şekli manyetiktir. Mühendisler, robotun içine manyetik malzemeler yerleştirir ve ardından mikro robotu harici bir manyetik alan aracılığıyla yönlendirir. Mühendisler daha büyük bir manyetik alan oluşturmak için insan vücudunun dışına hareketli bir mıknatıs veya elektromanyetik bobin yerleştirir ve manyetik alan insan vücuduna tamamen zararsız bir şekilde etki edebilir. Manyetik alanın yönünü ve gradyanını değiştirmek, mikro robota istenen yörünge boyunca hareket etmesi için kuvvet ve tork (nesnenin dönmesine neden olan tork) uygulayacaktır.Manyetik alanın yönündeki ve gradyanındaki değişiklik, mikro robotun hareket etme şeklini belirler.
Döndür, kaydır ve kaydır
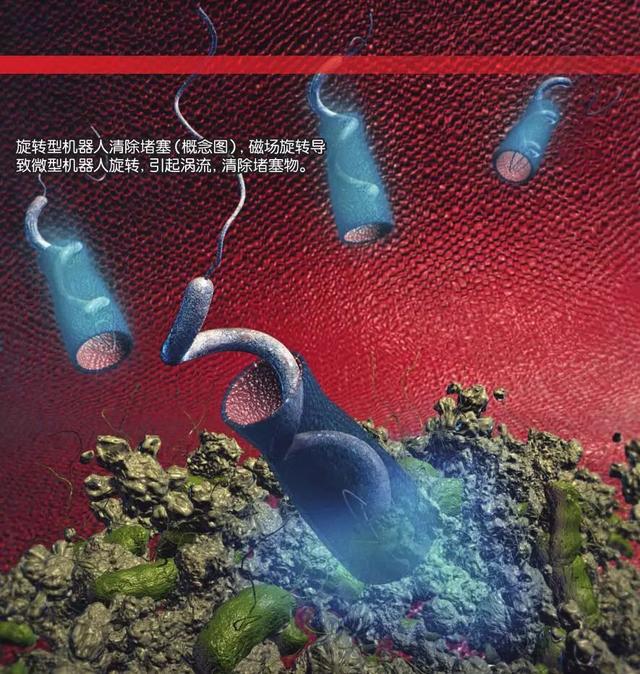
Mikro robotun aktivasyon moduna ek olarak deneydeki mikro robotun hareket modu da farklıdır. İnsan ortamının çoğu sıvı olduğu için mikro robotların akışkan bir ortamda hareket etme kabiliyetine sahip olması gerekir. Bazı araştırmacılar doğada çözüm ararlar ve birçok mikroorganizmanın kendilerini ilerletmek için flagella (motor fonksiyonları olan belirli bakteri hücrelerinde büyüyen bir protein aksesuar filamenti) kullandığını fark ettiler. Flagella temel alınarak tasarlanan spiral şekilli mikro robot, dönen bir manyetik alan tarafından tahrik edilen bir burgu gibi dönecektir. Bununla birlikte, dönme hareketi sıvı ortamlar için uygundur, ancak insan vücudundaki pürüzlü ve yapışkan yüzeyler (mide mukozası gibi) için uygun değildir.
En yaygın hareket yolu, mikro robotları kaydırmak için manyetik kuvvet gradyanları kullanmaktır.Manyetik kuvvet gradyanları, manyetik nesneleri daha güçlü manyetik alanlara sahip alanlara çekecektir. Ancak pürüzlü yüzeylerde, manyetik kuvvet gradyanının etkisi altında kayma, sürtünme gibi büyük bir dirence maruz kalacaktır. Bu nedenle, kayma laboratuvarda iyi performans gösterse de pratik uygulamalar için uygun değildir.
Ayrıca yuvarlanma (çevirme) hareket yöntemleri de vardır. Dönen manyetik alan yapay kamçı döndürmek için kullanılabildiğinden, ince nesneleri döndürmek için de kullanılabilir. Uzun ve ince bir blok haline getirilen mikro robot, manyetik tork etkisi altında döndürülür.Bu sırada, mikro robotun bir tarafı ile temas yüzeyi arasındaki sürtünme kuvveti, bu tarafın yüzeyi sıkıca "tutmasını" sağlar ve diğer taraf Öne doğru çevirin ve mikro robot ilerlemeye başlar. Bu hareket yolu ile mikro robot, oluk şeklindeki mide yüzeyinde serbestçe hareket edebilir.

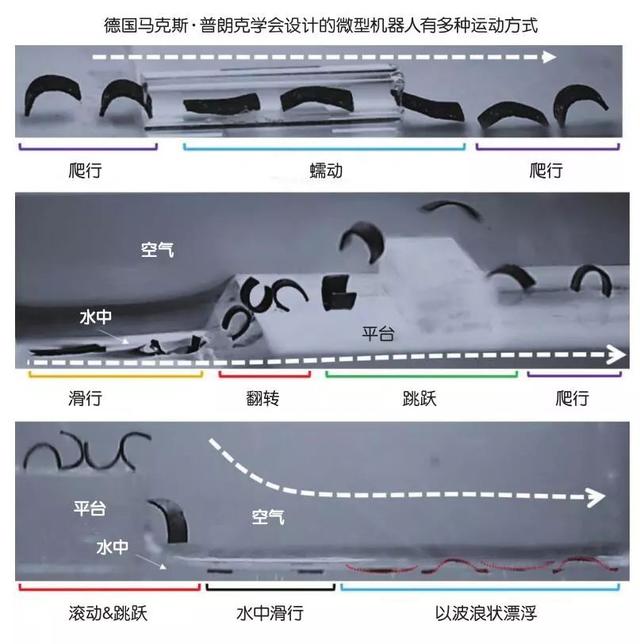
Mikro robotlar tek bir hareket türüne veya birden fazla hareket türüne sahip olabilir. Örneğin, 2016'da İsviçre'deki Zürih Teknoloji Enstitüsü'ndeki araştırmacılar, spiral şekilli bir mikro robot oluşturmak için biyouyumlu hidrojeller ve manyetik nanopartiküller kullandılar. İleriye doğru. 2018 yılında Max Planck Society of Germany tarafından tasarlanan minyatür robot, düz olmayan yüzeylerde yuvarlanabilir, zıplayabilir veya sürünebilir, ayrıca sıvı bir ortamda yüzebilir. Spiral mikro robota benzer şekilde, mikro robot, yalnızca 4 milimetre uzunluğunda (bir tırnağın genişliğinin yarısından az) elastik bir silikon gofret içine gömülü manyetik parçacıklara sahiptir ve araştırmacılar, robotun hareketini harici bir manyetik alan üzerinden kontrol eder.
Grup işbirliği ve görev yürütme
Bilim adamları, mikro robotların daha iyi uygulama etkilerine sahip olmasını sağlamak için, tıpkı bir karınca kolonisi gibi bir grup robotun birlikte çalışmasını umuyor. Örneğin, insan vücuduna daha fazla ilaç taşımak için birden fazla mikro robot birlikte çalışabilir. Bununla birlikte, mikro robotların işbirliğinin farkına varmak hala zorluklarla karşı karşıyadır.Mevcut manyetik alan kontrol teknolojisi, robotlara ayrı ayrı hareket etme komutu veremez.Tüm robotlar aynı büyük manyetik alan tarafından kontrol edilir. Şu anda bilim adamları, gelecekte birden fazla mikro robotu koordine etmeyi ve kontrol etmeyi umarak küçük ölçekli sürüş için mikro elektromanyetik alan teknolojisi üzerinde çalışıyorlar.
Mikro robotu mükemmel şekilde kontrol edip hareket ettirebildiğimizde, zorluğun bir sonraki aşaması, robotun çeşitli karmaşık görevleri gerçekleştirmesine izin vermektir. Şu anda mikro robotlar, nesneleri itmek ve kavramak gibi yalnızca bazı basit eylemleri gerçekleştirebilir. Öngörülen tıbbi görevleri tamamlamak için mikro robotların çalışma yeteneklerinin iyileştirilmesi gerekmektedir.
Minyatürleştirme teknolojisinin ilerlemesiyle, çok uzak olmayan bir gelecekte, bir mikro robot ekibi kan damarlarında yüzecek, vücudun her köşesini keşfedecek ve hareket halindeyken tedavi edici ilaçlar ve onarım hücreleri teslim edecek.