Today Paper | ScrabbleGAN; UnrealText; izleme modeli; G2L-Net, vb.

içindekiler
UnrealText: Sanal dünyadan gerçek sahne metin görüntülerini sentezleyin
ScrabbleGAN: Yarı denetimli değişken uzunlukta el yazısı metin oluşturma
ROAM: Yinelemeli optimizasyon izleme modeli
G2L-Net: Gerçek zamanlı 6D poz tahmini için yerleşik vektör özelliklerine sahip küreselden yerel ağa
İnsan poz tahmini için çok görüntülü görüntülerin giyilebilir IMU füzyonu: geometrik bir yöntem
UnrealText: Sanal dünyadan gerçek sahne metin görüntülerini sentezleyin
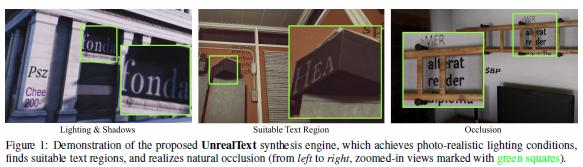
Bildiri Başlığı: UnrealText: Gerçek Olmayan Dünyadan Gerçekçi Sahne Metin Görüntülerini Sentezleme
Yazar: Long Shangbang / Yao Cong
Gönderme süresi: 2020/3/24
Kağıt bağlantısı: https://arxiv.org/abs/2003.10608v1
https://paper.yanxishe.com/review/15414
Önerilen neden
Bu makale CVPR 2020 tarafından alındı ve bir 3D grafik motoru aracılığıyla gerçekçi görüntüler oluşturabilen UnrealText adlı bir görüntü sentezi yöntemi önerdi. 3D kompozisyon motoru, sahneyi ve metni bir bütün olarak işleyerek gerçekçi bir görünüm sağlar ve kesin sahne bilgilerine erişim sağlar. Bu makale, önerilen yöntemin sahne metni algılama ve tanımadaki etkinliğini çok sayıda deney yoluyla doğrulamaktadır. Bu makale ayrıca, çok dilli sahne metni algılama ve tanıma üzerine gelecekteki araştırmalar için çok dilli bir versiyon oluşturacaktır.

ScrabbleGAN: Yarı denetimli değişken uzunlukta el yazısı metin oluşturma
Kağıt adı: ScrabbleGAN: Yarı Denetimli Değişken Uzunluk El Yazısıyla Yazılmış Metin Oluşturma
Yazar: Fogel Sharon / Averbuch-Elor Hadar / Cohen Sarel / Mazor Shai / Litman Roee
Gönderme süresi: 2020/3/23
Kağıda bağlantı: https://arxiv.org/abs/2003.10557v1
https://paper.yanxishe.com/review/15413
Önerilen neden
Bu makale CVPR 2020 tarafından kabul edildi ve el yazısı metin oluşturma konusu olarak kabul edildi.
Derin öğrenme yöntemleri, el yazısıyla yazılmış metin tanımada önemli performans iyileştirmeleri sağlamıştır, ancak, el yazısıyla çalışan herkesin kendine özgü bir tarzı olduğundan, derin öğrenmeye dayalı eğitim örnekleri sınırlı olacaktır. Veri toplamak zorlu ve maliyetli bir iştir ve sonraki etiketleme görevi de çok zordur. Bu kağıt, veri etiketleme yükünü azaltmak için yarı denetimli bir yöntem kullanır. Tam denetimli yöntemle karşılaştırıldığında, yarı denetimli yöntem yalnızca etiketli verileri kullanmakla kalmaz, aynı zamanda performansı iyileştirmek için bazı etiketlenmemiş örnekler kullanır, böylece test setindeki yeni görüntülere daha iyi uyum sağlayabilir.

ROAM: Yinelemeli optimizasyon izleme modeli
Makale Başlığı: ROAM: Yinelenen Optimize Edilen İzleme Modeli
Yazar: Yang Tianyu / Xu Pengfei / Hu Runbo / Chai Hua / Chan Antoni B.
Gönderme süresi: 2019/7/28
Kağıda bağlantı: https://arxiv.org/abs/1907.12006v3
https://paper.yanxishe.com/review/15412
Önerilen neden
Bu makale CVPR 2020 tarafından alındı ve reaksiyon oluşturma ve sınırlayıcı kutu regresyonundan oluşan bir izleme modeli önerdi.Reaksiyon oluşturma kısmı, nesnenin farklı pozisyonlarda göründüğünü ve sınırlayıcı kutu regresyon kısmının göreceli sınıra geri döndüğünü göstermek için bir ısı haritası oluşturdu. Sürgülü pencereyi konumlandırmak için çerçeve. Modeli görünüm değişikliklerine etkili bir şekilde uyarlamak için, bu makale izleme modelini çevrim dışı olarak yinelemeli bir nöral optimize ediciyi eğiterek güncellemeyi önerir, böylece model birkaç gradyan adımında birleşir, bu da güncellenmiş izleme modelinin yakınsama hızını artırır ve daha iyi sonuçlar elde eder. Verim. Yeni önerilen model ROAM ve ROAM ++ OTB, VOT, LaSOT, GOT-10K ve TrackingNet kıyaslama veri setlerinde değerlendirilir Deneysel sonuçlar, yeni önerilen yöntemin en gelişmiş yöntemlerden önemli ölçüde daha iyi olduğunu göstermektedir.


G2L-Net: Gerçek zamanlı 6D poz tahmini için yerleşik vektör özelliklerine sahip küreselden yerel ağa
Bildiri Başlığı: G2L-Net: Vektör Özelliklerini Gömülü Gerçek Zamanlı 6D Poz Tahmini için Küreselden Yerel Ağa
Yazar: Chen Wei / Jia Xi / Chang Hyung Jin / Duan Jinming / Leonardis Ales
Gönderme süresi: 2020/3/24
Makaleye bağlantı: https://arxiv.org/abs/2003.11089v1
https://paper.yanxishe.com/review/15408
Önerilen neden
Bu makale CVPR 2020 tarafından alındı ve tutum tahmini hakkındaydı.
Bu makale, üç bölümden oluşan G2L-Net adlı gerçek zamanlı bir 6D hedef poz tahmin çerçevesi önermektedir: önce iki boyutlu algılama yoluyla RGB-D görüntüden kaba taneli hedef nokta bulutunu çıkarın; ardından kaba taneli hedef nokta bulutunu ekleyin Üç boyutlu bölümleme ve hedef göç tahmini, geçiş konumlandırma ağında gerçekleştirilir; son olarak, ince taneli hedef nokta bulutu, ilk hedef dönüşü tahmin etmek için rotasyon konumlandırma ağını eğitmek için kullanılan tahmin tarafından elde edilen segmentasyon ve çeviri bilgileri aracılığıyla yerel düzenli koordinatlara dönüştürülür. Üçüncü adımda, G2L-Net nokta nokta gömme vektör özelliklerini tanımlayarak görünüm algısının bilgilerini yakalar. Daha doğru bir dönüşü hesaplamak için, G2L-Net ayrıca ilk rotasyon ile gerçek etiket arasındaki bakiyeyi tahmin etmek için bir rotasyon artık tahmin edicisi kullanır, böylece ilk poz tahmininin performansını iyileştirir. İki kıyaslama veri seti üzerinde yapılan çok sayıda deney, G2L-Net'in doğruluk ve hız açısından en son seviyeye ulaştığını göstermektedir.


İnsan poz tahmini için çok görüntülü görüntülerin giyilebilir IMU füzyonu: geometrik bir yöntem
Bildiri Başlığı: İnsan Duruşu Tahmini için Giyilebilir IMU'ları Çoklu Görünümlü Görüntülerle Birleştirme: Geometrik Bir Yaklaşım
Yazar: Zhang Zhe / Wang Chunyu / Qin Wenhu / Zeng Wenjun
Gönderme süresi: 2020/3/25
Makaleye bağlantı: https://arxiv.org/abs/2003.11163v1
https://paper.yanxishe.com/review/15407
Önerilen neden
Bu makale CVPR 2020 tarafından kabul edildi ve 3D insan pozu tahmini problemini çözmek için.
Giyilebilir bir Atalet Ölçüm Birimi (IMU) kullanan bu makale, her bir eklem çiftinin görsel özelliklerini geliştirmek için Oryantasyon Düzenli Ağ (ORN) adı verilen geometrik bir yöntem önermektedir. Bir eklem tıkandığında, yeni yöntem 2B poz tahmininin doğruluğunu önemli ölçüde artırabilir. Daha sonra, bu makale, 3B poz ve IMU yönünün yanı sıra 3B pozlar arasındaki yansıtma hatasını en aza indirmek için çoklu görüntülü 2B pozu 3B alana yükseltmek için Yönlendirme Düzenli Resimsel Yapı Modeli'ni (ORPSM) kullanır arasındaki fark. Bu iki aşamalı yöntem, genel veri kümelerindeki hataları önemli ölçüde azaltır.


